Donnerstag, 30. März 2023

Aufbau eines Schwingungsmodells für einen 2-Massen-Schwinger
Zielstellung ist es eine Kombination von 3 Massen und 2 Federn so aufeinander abzustimmen, dass die mittlere Masse eine so geringe Beschleunigung wie möglich erfährt. Diese stellt eine Struktur dar welche sensibel für harte Stöße und Vibrationen ist und deswegen mittels geeignetem Mehr-Massen-System hinsichtlich der geringen Beschleunigungen optimiert werden soll.
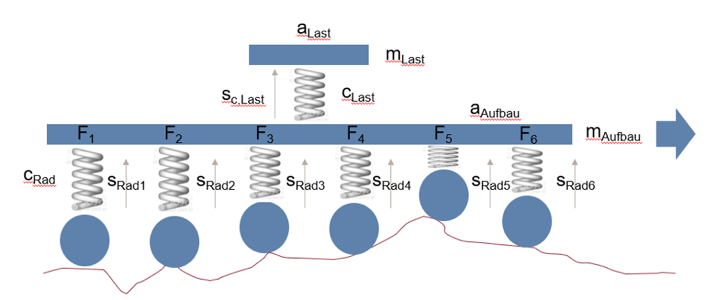
Da wir zuerst die Grundlagen aus dem Studium Maschinendynamik wieder auskramen möchten, habe ich kurzerhand einen einfachen 2-Massen-Schwinger modelliert.
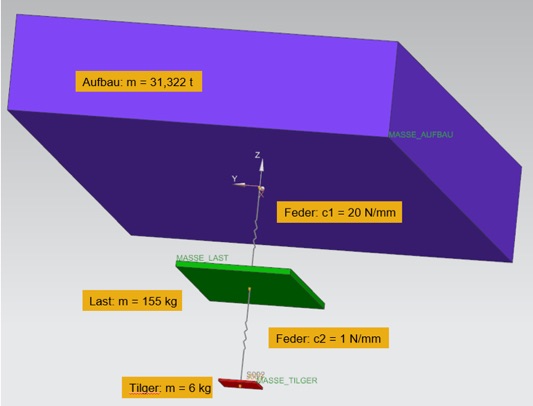
Wir haben genau genommen 3 Massen, von denen die größte Masse (lila in der Abb.) theoretisch unendlich groß und fest ist. Praktisch ist diese endlich und wird mittels eines zeitlichen Verlaufs des Weges in vertikaler Richtung ausgelenkt.
Parameter hierbei sind:
• maufbau=31,322 t
• sinusförmige vertikale Auslenkung mit Amplitude 10mm mit steigender Anregungsfrequenz bis 20Hz
Mit dem Ziel der Herleitung der auslegungsrelevanten Größen bzw. Größenverhältnisse wurde mittels NX motion eine dynamische Analyse erstellt.
Zunächst die grundlegenden Gleichungen für das Schwingsystem:

Was würden wir erwarten nach einem Simulationslauf?
• Ein System mit 2 Massen hat auch 2 Resonanzfrequenzen
• Wenn wir einen Sinus-Sweep fahren würden beide Resonanzen durchlaufen und man würde das an der Amplitude der Einzelschwingungen sehen.
• Die Resonanzfrequenz könnte direkt einer Masse zugeordnet werden.
Was würden wir unternehmen um das System zu verbessern?
• Die Resonanzfrequenzen nach oben zu schieben würde helfen, da höhere Frequenzen mit deutlich geringer Anregungshöhe anregen und dort eine Resonanz weniger schlimm ist
• Dazu könnte man prinzipiell die Masse kleiner machen (was nicht geht) oder die Federkennlinie steifer machen Resonanzfrequenz erhöht sich
• Da der Schwingweg durch den zur Verfügung stehenden Platz und die ausgewählte Feder begrenzt ist sollte dieser ebenfalls begrenzt werden.
NX Lösung: Modellparameter
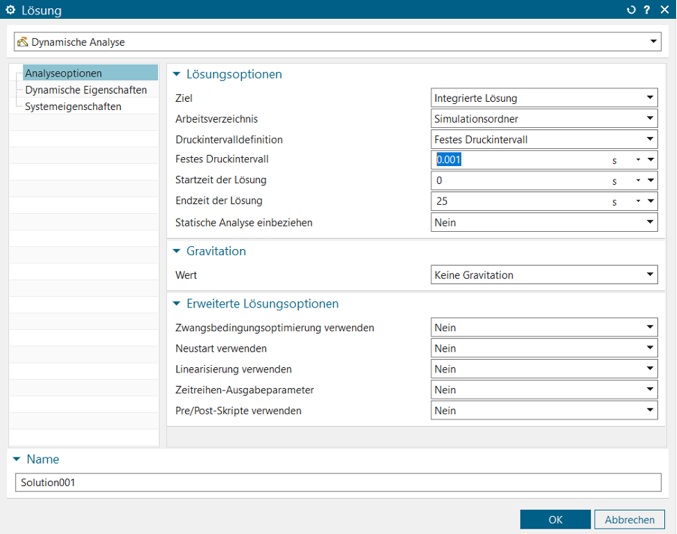
Da die Anregungstabelle im Excel in festen Zeitschritte von 1ms abgestuft ist sollte die Simulation ebenfalls dieselbe Auflösung haben, um jeden Wert zu berücksichtigen. Der Anregungszeitraum dauert 20s bzw. die Zeit ist gleichzeitig die Frequenz … also bis 20 Hz Anregung. Die Simulation dauert 5 Sekunden länger um zu sehen wie das System ohne Anregung aus- bzw. weiterschwingt.
Simulationslauf
Über einen Zeitbereich von insgesamt 25 Sekunden werden Frequenzen bis 20 Hz angeregt. Im ersten Simulationslauf wird mit den oben im Bild dargestellten Parametern simuliert. Hier wird ohne Dämpfung simuliert.
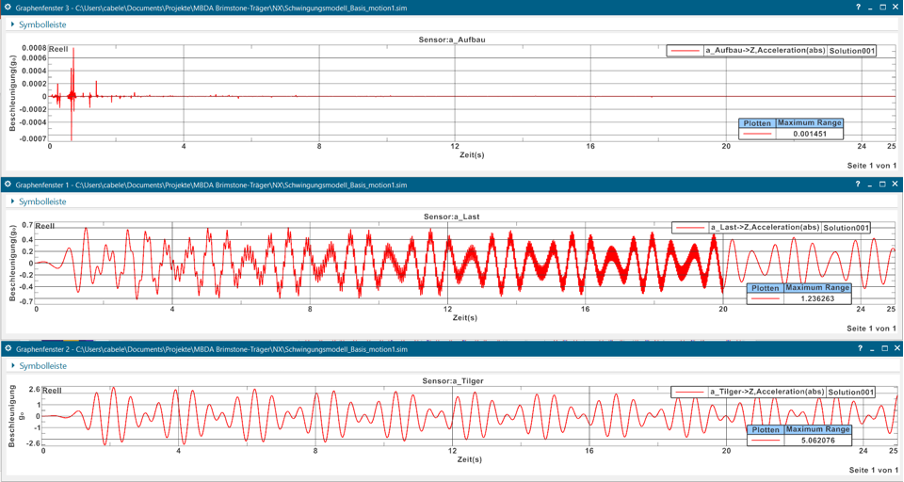
Abb. Beschleunigungen ohne Dämpfer aAufbau, aLast, aTilger
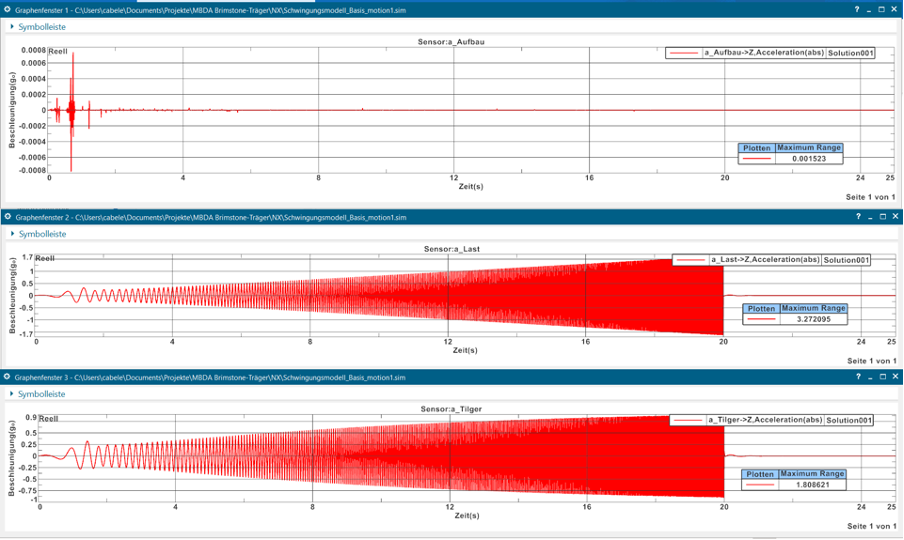
Abb. Beschleunigungen mit Dämpfer aAufbau, aLast, aTilger
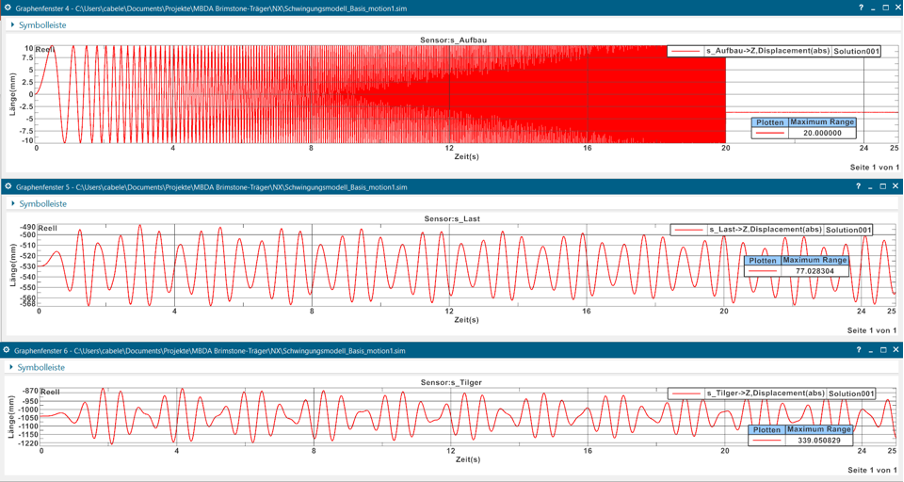
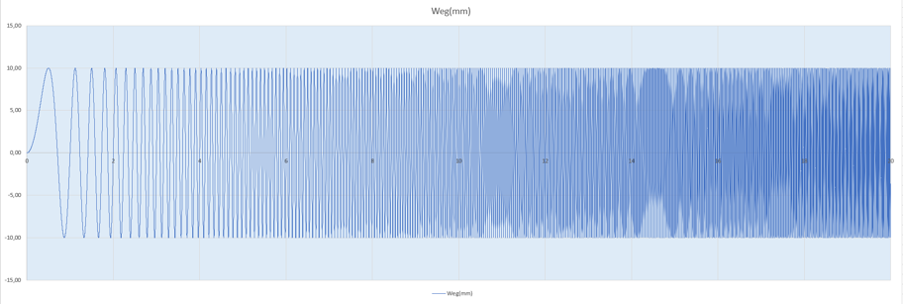
Abb. Auslenkungen ohne Dämpfung sAufbau, sLast, sTilger
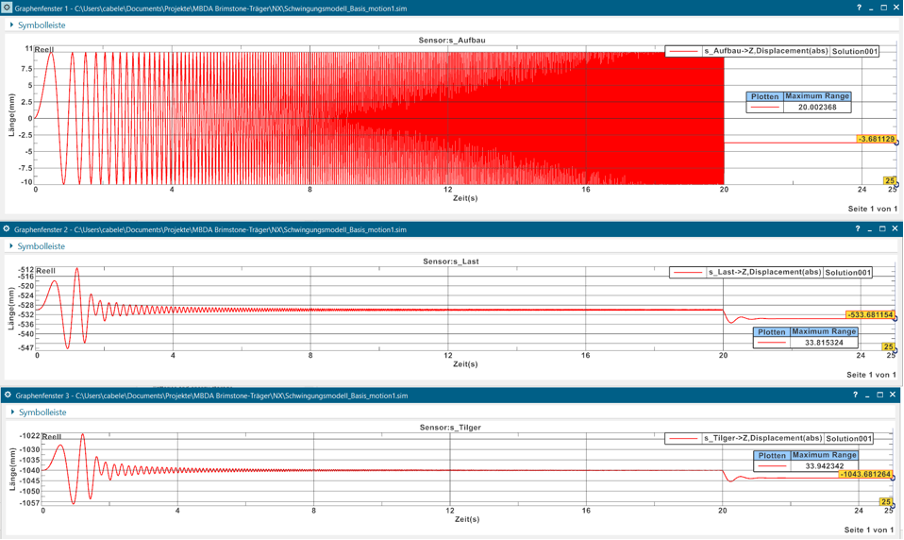
Abb. Auslenkungen mit Dämpfung sAufbau, sLast, sTilger
Insgesamt sieht man, dass das ungedämpfte System nach den 20s Anregung noch stark weiterschwingt, während die Anregung sAufbau bereits aufgehört hat. Die Dämpfung hat Vorteile bezüglich des Schwingwegs, welcher etwa halbiert wird. Allerdings erhöht sich die Beschleunigung auf die Last bei steigender Anregungsfrequenz. Da der Dämpfer mit zunehmender Auslenkungsgeschwidigkeit härter wird bzw. eine zunehmende Reaktionskraft aufbringt überwiegen bei hohen Frequenzen die Dämpferkräfte die Federkräfte.
Das ist schlecht, denn das Ziel ist es ja hier die Beschleunigung zu senken, auch bei hohen Frequenzen. Es wäre also besser anstelle eines geschwindigkeitsabhängigen Dämpfers einen konstanten Reibungsdämpfer einzusetzen.