Freitag, 23. Dezember 2016


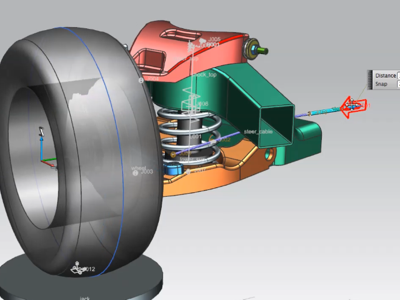
Kinematik-Simulation mit NX motion Teil 2 - Gelenke
Mit dem Kinematikmodul „motion“ in Siemens NX steht ein sehr leistungsfähiges MKS-Werkzeug zur Verfügung. Dessen Funktionsumfang beinhaltet neben den auch in CATIA Kinematics-Modul und in PRO/Mechanismus bekannten geometrische Kopplungen wie
-
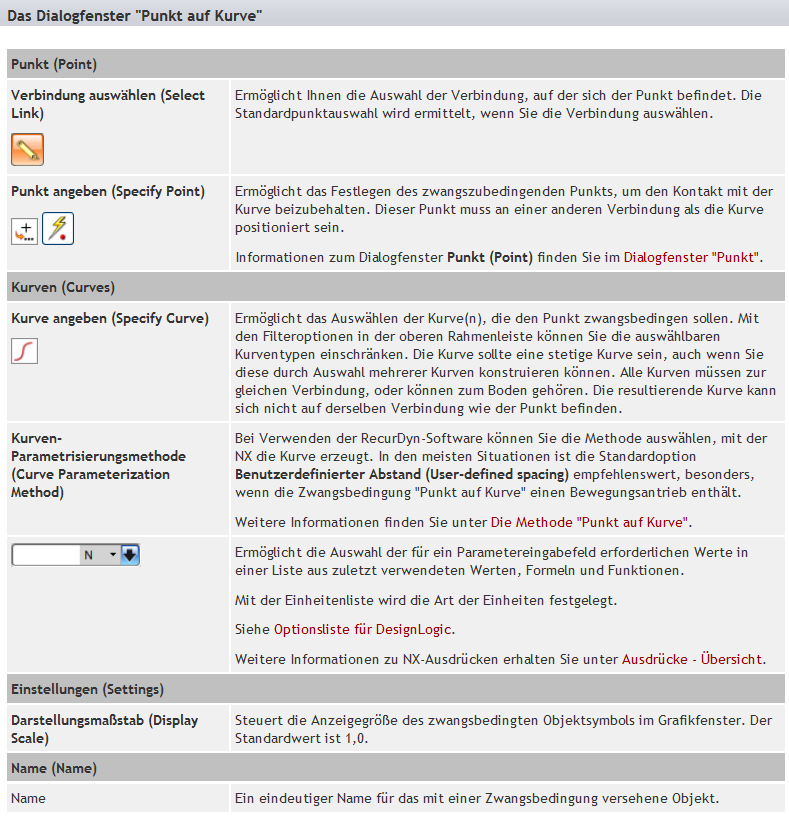
• Punkt-auf-Kurve
-
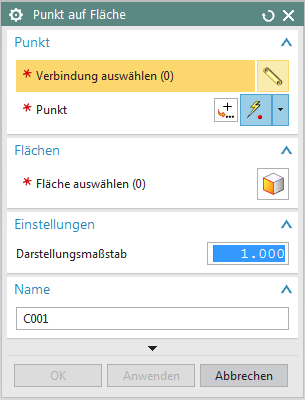
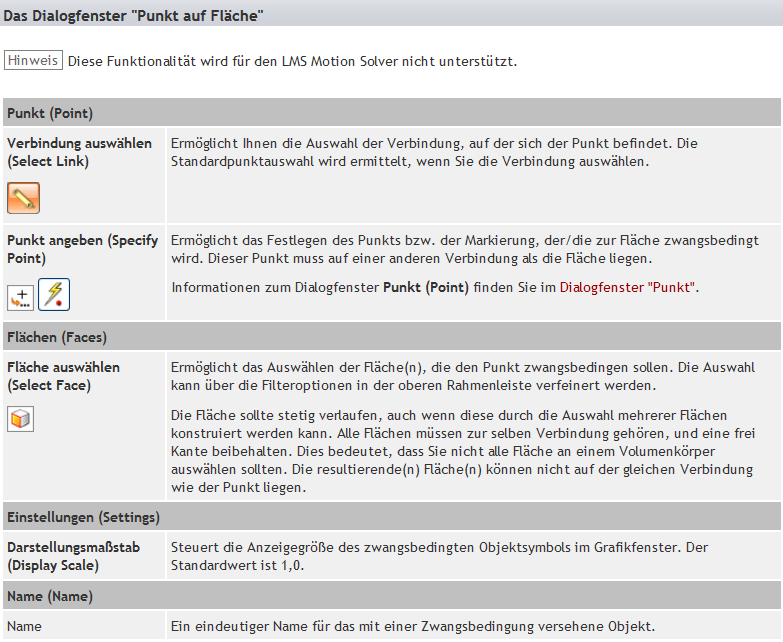
• Punkt-auf-Fläche
Die damit realisierbaren „idealen“ Kopplungen, die keinen Abweichungen von der Ideallinie unterliegen, bieten sich an bei Bauteilen, dessen Geometrie noch nicht gestaltet ist aber dessen Funktion bereits bekannt ist.
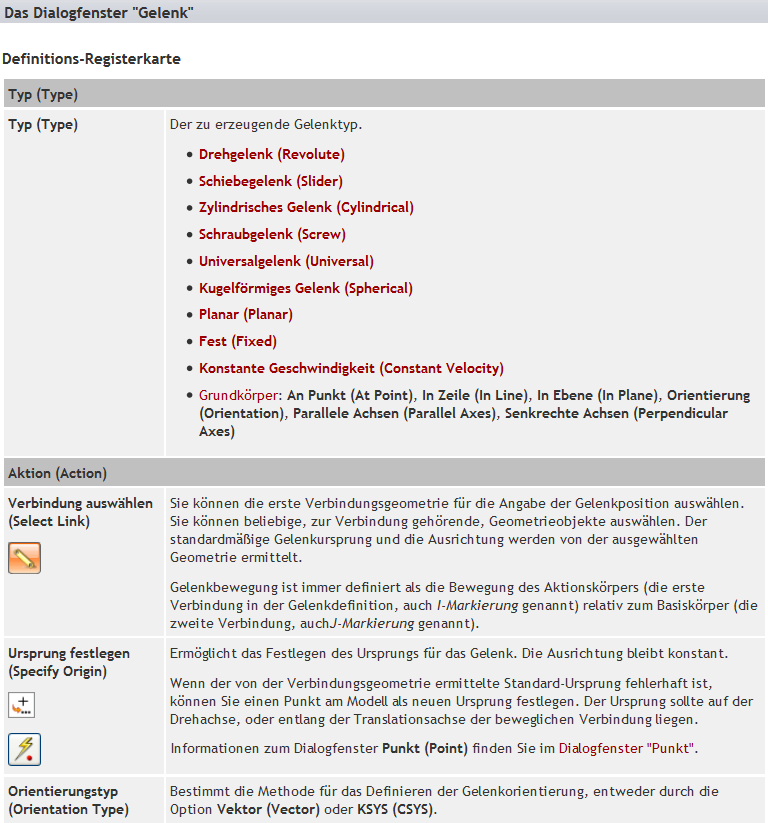
Für die Kinematiksimulation mit NX Motion gibt es folgende Gelenktypen bzw. Kopplungen:
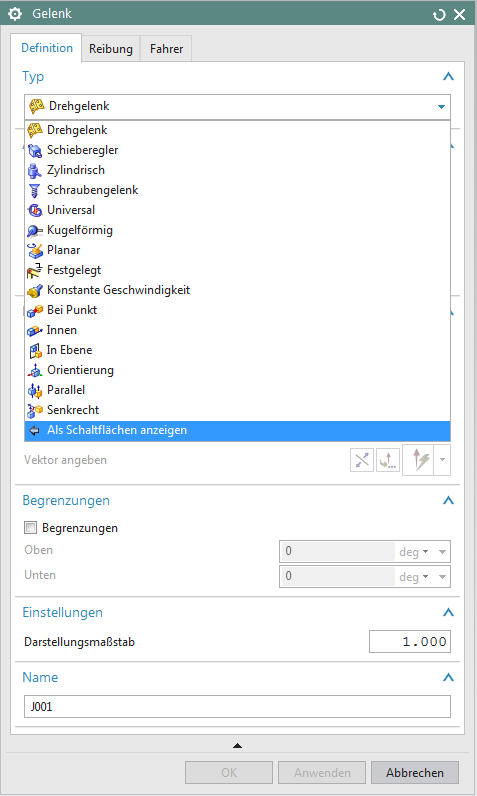
Drehgelenk:
- fest: 3x translatorisch, 2x rotatorisch
-
-frei: 1x roatorisch
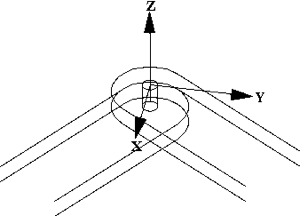
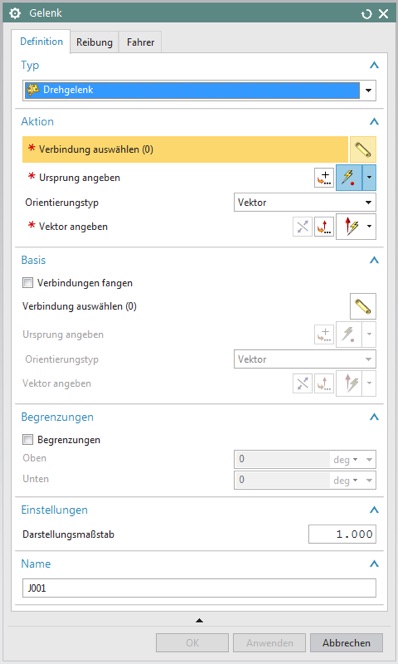
Ein Drehgelenk verknüpft zwei Verbindungen, und lässt ein rotationales Freiheitsgrad um die Z-Achse zu. Ein Drehgelenk lässt keine translationale Verschiebung in irgendeine Richtung zwischen den zwei Verbindungen zu. Einem Drehgelenk kann ein Kinematiktreiber zugewiesen werden.


Merkmale und Einschränkungen
- Die Drehachse ist die Z-Achse eines festgelegten Koordinatensystems.
- Die Ursprünge auf jeder Verbindung sind deckungsgleich.Die Drehachsen für jede Verbindung (Z1 und Z2) - Die Drehachsen für jede Verbindung (Z1 und Z2) verlaufen kolinear oder parallel.
Schieberegler:
- fest: 3x rotatorisch, 2x translatorisch
- frei: 1x translatorisch
Ein Schiebegelenk verknüpft zwei Verbindungen, und lässt ein translationales Freiheitsgrad zwischen den Verbindungen zu. Schiebegelenke lassen keine rotationale Bewegung zwischen zwei Verbindungen zu. Einem Schiebegelenk kann ein Kinematiktreiber zugewiesen werden.
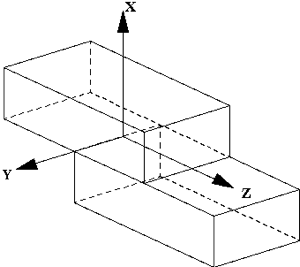
Merkmale und Einschränkungen
- Translation erfolgt entlang der Z-Achse.
- Die Translationsachsen (Z) verlaufen kolinear, und die X- und Y-Achsen sind ausgerichtet.
Zylindrisch:
- fest: 2x translaorisch, 2x roatatorisch
- frei: 1x rotatorisch, 1x translatorisch
Ein zylindrisches Gelenk verbindet zwei Verbindungen, und lässt zwei Freiheitsgrade zu: eine translationale und eine rotationale um die Z-Achsen der mit dem Gelenk verknüpften Verbindungen. Bei einem zylindrischen Gelenk können sich die zwei Verbindungen frei drehen, und sich relativ umeinander und entlang der Z-Achse verschieben. Mit dem RecurDyn-Solver kann einem zylindrischen Gelenk mit unabhängigen Dreh- und Translationswerten ein Kinematiktreiber für Lösungen des Typs "Normale Ausführung" zugewiesen werden.
Merkmale und Einschränkungen
- Sowohl die Drehachse als auch die Translationsachse stellen die Z-Achse dar.
- Die Drehachsen (Z1 und Z2) verlaufen kolinear, und die translationalen Achsen (Z1 und Z2) sind ausgerichtet.
Universal:
- fest: 3x translatorisch, 1x rotatorisch
- frei: 2x rotatorisch
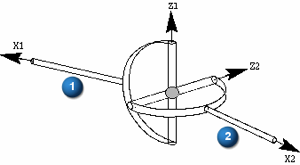
1.) – Aktionsverbindung
2.) – Basisverbindung
Ein Universalgelenk verbindet zwei Drehverbindungen so, dass sie in einer gesteuerten fehlerhaften Winkelausrichtung liegen. Universalgelenke werden gewöhnlich zur Erzeugung eines flexiblen Gelenks verwendet, das zwei Rotationsfreiheitsgrade zulässt. Das Universalgelenk ähnelt dem CV-Gelenk, außer dass ein CV-Gelenk die konstante Geschwindigkeit durch die Drehachse des Gelenks gewährleistet.
Merkmale und Einschränkungen
- Die Bewegung ist um zwei senkrechte Z-Achsen rotational.
- Die Drehachsen stellen die X-Achse der Gelenkausrichtung auf jeder Verbindung dar.
- Gelenkursprünge auf jeder Verbindung sind deckungsgleich.
Kugelförmig:
- fest: 3x translatorisch
- frei: 3x rotatorisch
Ein kugelförmiges Gelenk verbindet zwei Verbindungen, und lässt drei rotationale Freiheitsgrade zu: die Rotationen um die X-, Y-, und Z-Achse der mit dem Gelenk verknüpften Markierungen. Kugelförmige Gelenke sind auch bekannt als Kugelgelenkverbindungen.
Merkmale und Einschränkungen
- Die Bewegung ist rotational um die X-, Y-, und/oder Z-Achse. Die Ursprünge der Gelenkausrichtung auf jeder Verbindung müssen aufeinander fallen, jedoch dürfen die Z-Achsen nicht ausgerichtet sein.
- Die Variablen stellen die Rotationen zwischen jedem Markierungsachsenpaar dar: X1X2, Y1Y2, und Z1Z2. Sie können keine Bewegung auf dieses Gelenk anwenden, jedoch überträgt es genau die Bewegung von einem starren Körper/Verbindung auf ein anderes.
Planar:
- fest: 1x translatorisch, 2x rotatorisch
- frei: 2x translatorisch, 1x rotatorisch
Fest:
- fest: 3x translatorisch, 3x rotatorisch
Konstante Geschwindigkeit:
- fest: 3x translatorisch, 1x rotatorisch
- frei: 2x rotatorisch
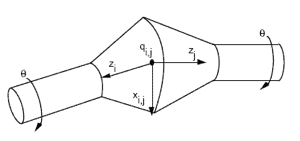
Ein CV-Gelenk ähnelt einem Universalgelenk, außer dass ein CV-Gelenk eine konstante Geschwindigkeit durch die Drehachse des Gelenks gewährleistet. CV-Gelenke sind in der Automobilindustrie sowie in bestimmten Arten des Maschinenbaus üblich.
Merkmale und Einschränkungen
- Ein CV-Gelenk erlaubt zwei Rotationsfreiheitsgrade um die Z-Achsen der Verbindungen, die das Gelenk bilden.
- Rotation um die Z-Achse der Basisverbindung ist gleich und entgegengesetzt zur Rotation um die Z-Achse der Aktionsverbindung.
- Bei der Verbindung zweier Wellen, sollten die Z-Achsen der zwei Verbindungen an den Wellen weg vom Gelenkmittelpunkt nach unten zeigen.
- Typischerweise sollten entweder die X-Achsen oder die Y-Achsen der zwei Verbindungen parallel verlaufen.
An Punkt (gekoppelt):
- fest: 3x translatorisch
- frei: 3x rotatorisch
Auf Linie (gekoppelt):
- fest: 2x translatorisch
- frei: 1x translatorisch, 3x rotatorisch
In Fläche (gekoppelt):
- fest: 1x translatorisch
- frei: 2x translatorisch, 3x rotatorisch
Orientierung:
- fest: 3x rotatorisch
- frei: 3x translatorisch
Parallel (achsparallel):
- fest: 2x rotatorisch
- frei: 1x rotatorisch, 3x translatorisch
Senkrecht (achssenkrecht):
- fest: 1x rotatorisch
- frei: 2x rotatorisch, 3x translatorisch
Weitere Kopplungen gibt es dann noch, welche Raumkurven mit einbeziehen.
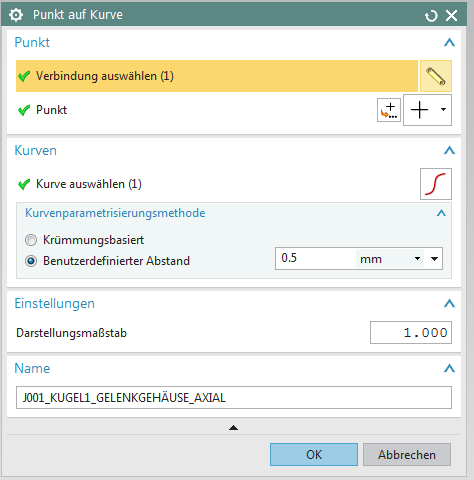
Punkt auf Kurve:
- fest: 2x translatorisch senkrecht zur Kurve
-
-frei: 1x translatorisch entlang der Kurve, 3x rotatorisch
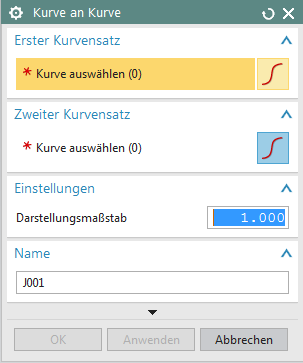
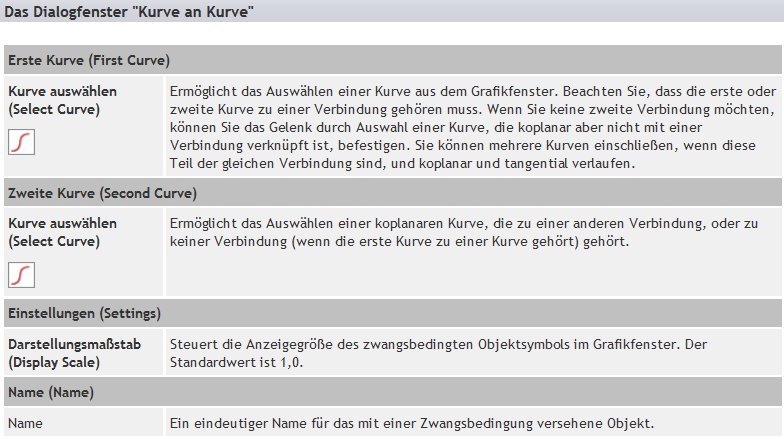
Kurve an Kurve:
- fest: 2x translatorisch senkrecht zur Kurve
- frei: 1x translatorisch entlang der Kurve, 3x rotatorisch
Punkt auf Fläche:
- fest: 1x translatorisch senkrecht zur Fläche
- frei: 2x translatorisch auf der Fläche, 3x rotatorisch