Donnerstag, 22. Dezember 2016


FE-Berechnung Gleichlaufgelenk - Pre-Processing
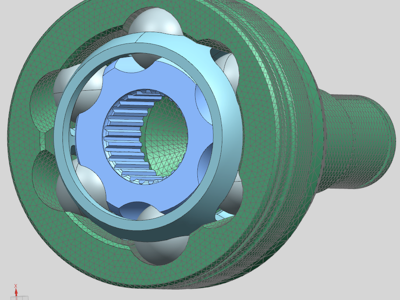
Es soll ein Gleichlaufgelenk für ein maximales Drehmoment von 6000 Nm statisch berechnet werden. Dazu soll am inneren Topf ein Lastmoment aufgebracht werden, der Flansch mit dem äußeren Topf wird fest eingespannt.
Die Kugeln und der Käfig werden nur über Kontakte auf Position gehalten, so wie das in der Realität auch der Fall ist.
Die FE-Berechnung besteht aus folgenden Aufgaben:
• Pre-Processing: Erstellung eines FE-Modells mit
-
• Positionieren aller mit zu betrachteten 3D-Körper als Baugruppe
-
• Vereinfachen der 3D-Körper bzw. WAVE-Ableiten aus den Original-3D-Körpern um KEs zu entfernen, die nicht relevant sind (wie z.B. Bohrungen und andere Details)
-
• Einspannen aller Bauteile im Raum bzw. Festlegen der Freiheitsgrade (3x Translation, 3x Rotation für jeden Körper)
-
• Definition der Kontakte zwischen den Bauteilen untereinander
-
• Vernetzen der 3D-Körper
• Solving: Starten des Berechnungslauf mit Hilfe eines Solvers
-
• Post-Processing: Auswerten der Berechnungsergebnisse
-
• Plausibilisierung des FE-Modells:
-
• ist das Modell korrekt aufgebaut?
-
• Bewegen sich die Körper in die richtige Richtung wie erwartet?
-
• Sind die Spannungsaussagen hinreichend genau oder muss lokal feiner vernetzt werden?
-
• Auswertung hinsichtlich
-
• Verformungen [mm]
-
• Dehnungen [%]
-
• Von-Mises-Spannungen oder maximale Hauptspannungen [MPa]
-
• usw.
Einspannungen und Freiheitsgrade
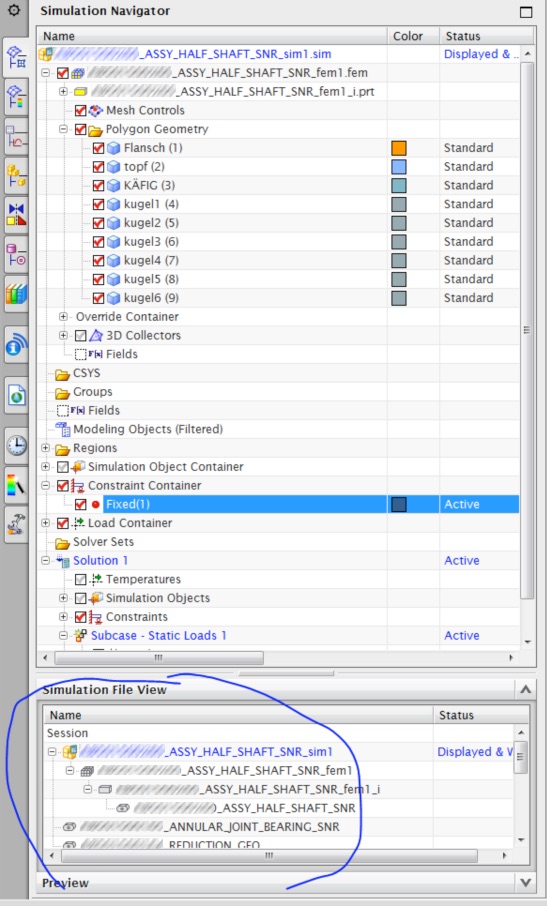
Im Fenster „Simulation File View“ doppelklicken wir auf die „*_sim1.sim“-Datei um diese aktiv zu machen.
Was möchten wir machen?
-
• Der Gelenkflansch wird fest eingespannt
-
• Der innere Topf wird mit M=6000 Nm Drehmoment über die Steckverzahnung belastet
-
•Alle übrigen Freiheitsgrade sollen sich über Kontakte einstellen
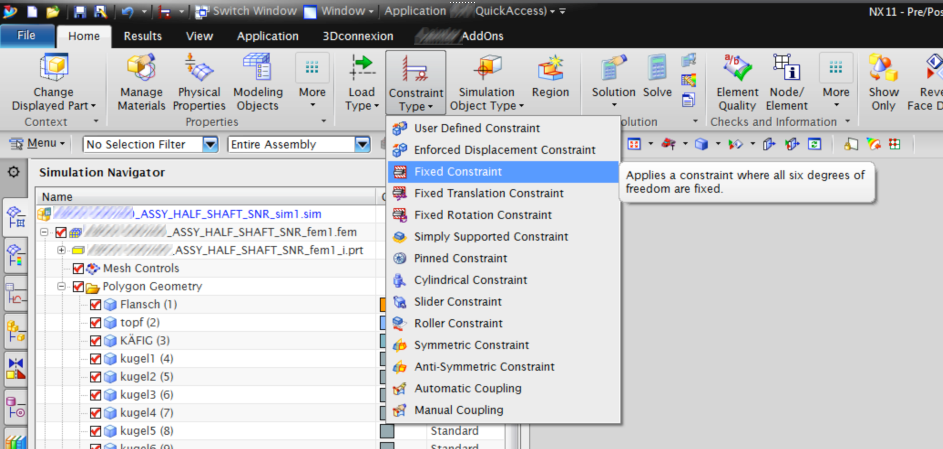
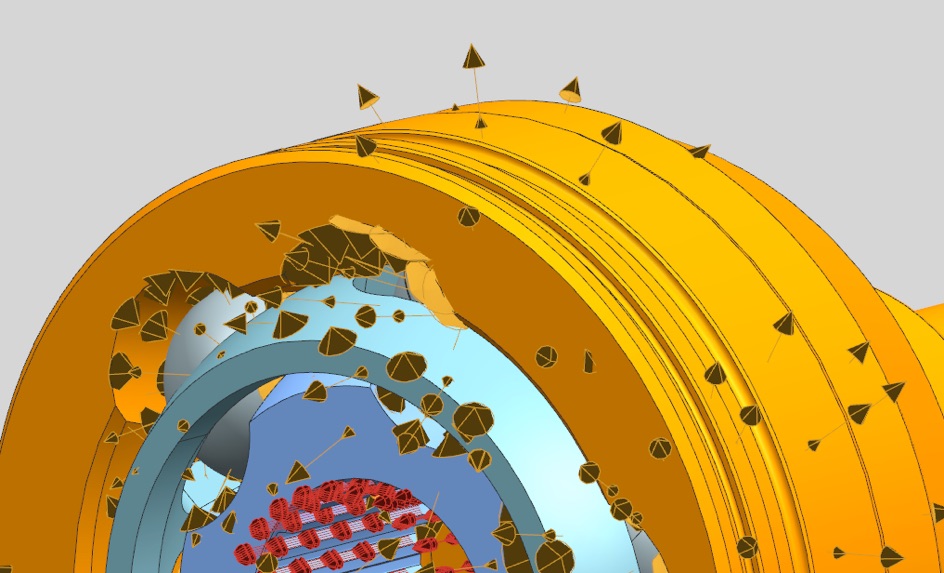
Jetzt wählen wir unter „Home/Constraint Type“ den Befehl „Fixed Constraint“ aus. Damit werden von einer Fläche, Kante oder eines Punktes alle Freiheitsgrade festgehalten – bei einer Fläche alle 6(3x Translation, 3x Rotation), bei einer Kante alle 5 (3x Translation, 2x Rotation) und bei einem Punkt alle 3 (3x Translation).
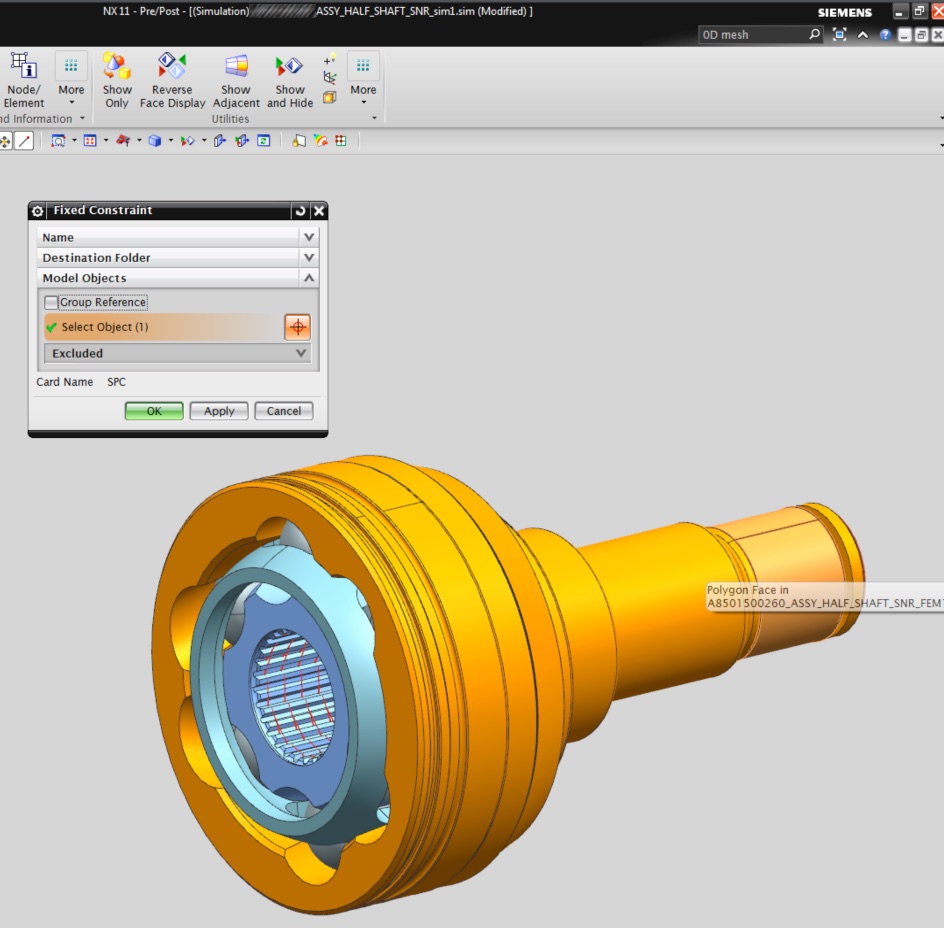
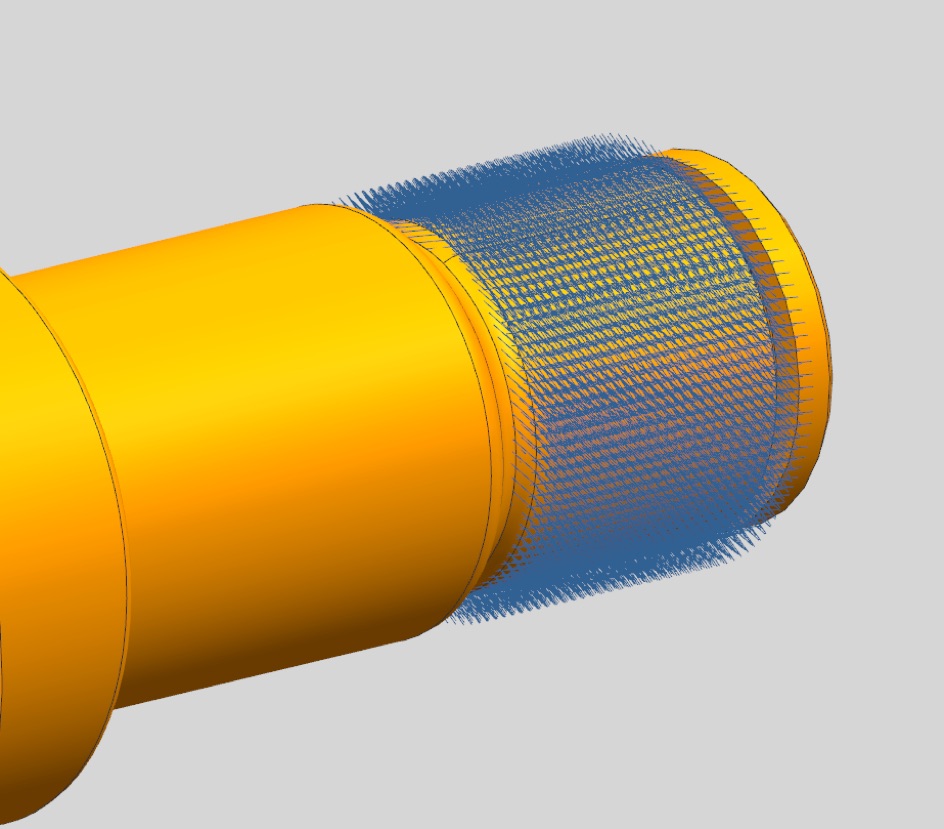
Wir wählen den Bereich der Steckverzahnung (nicht einmodelliert) am Außendurchmesser aus – dort wird der Flansch fest eingespannt.
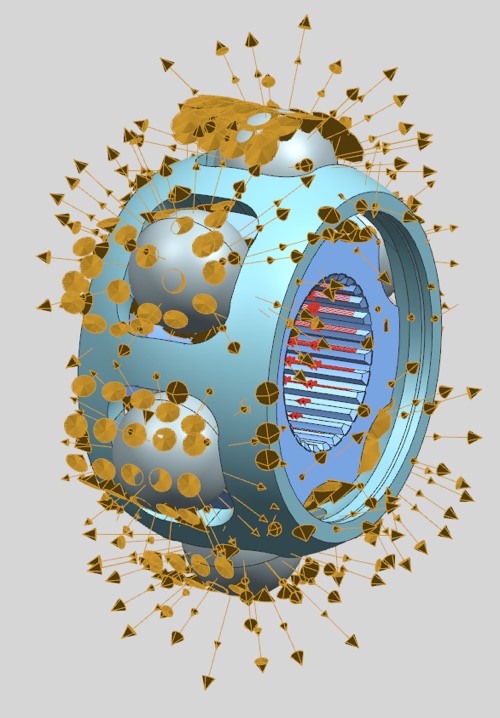
Anschließend wird die Festeinspannung optisch dargestellt.
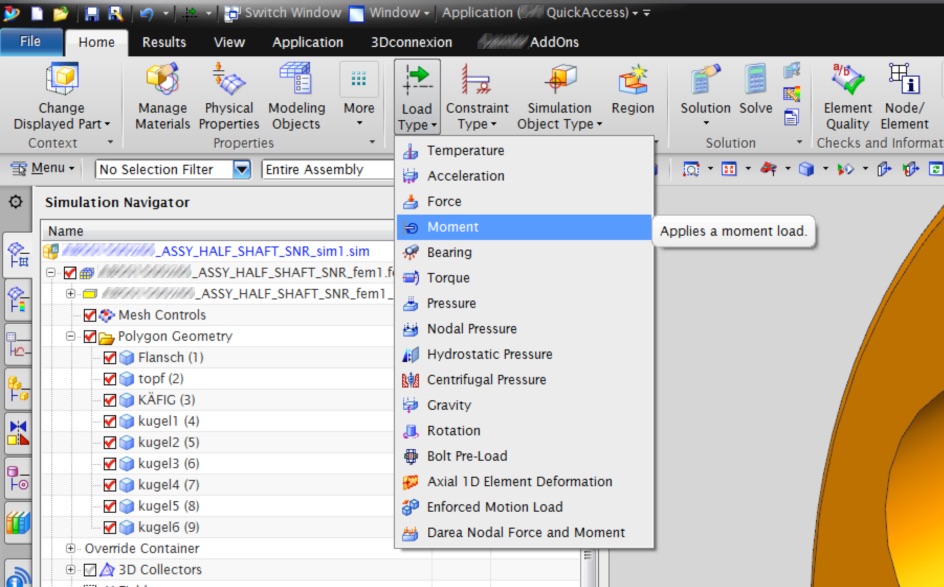
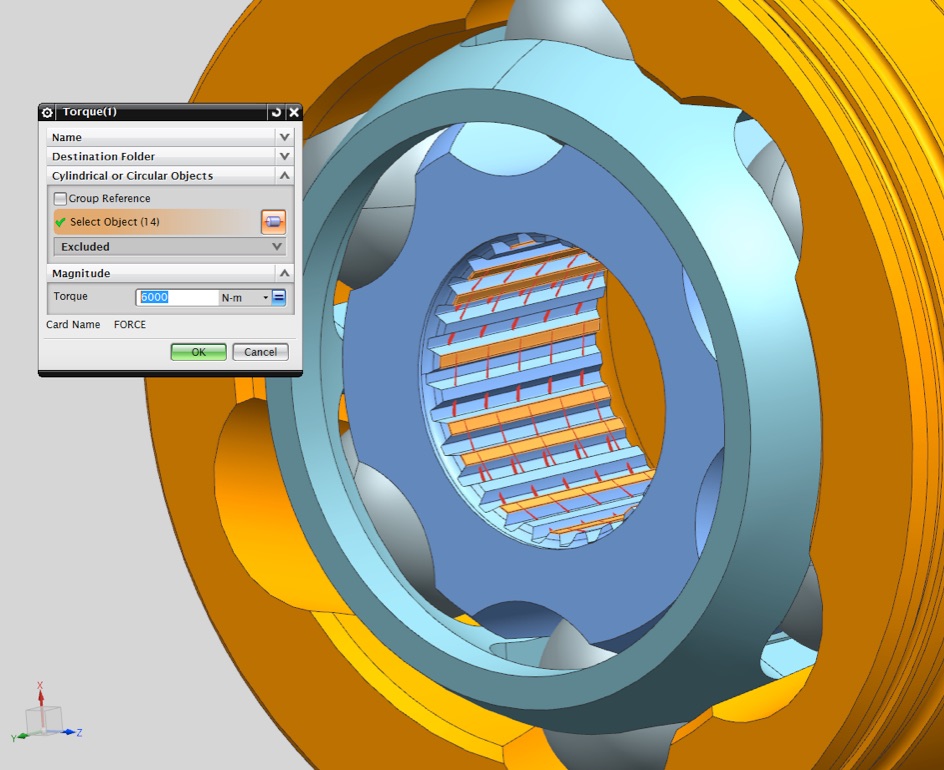
Das Dremoment wird über den Befehl „Home/Load Type/Torque“ auf eine zylindrische Fläche aufgebracht … in unserem Fall auf den Kopfkreisdurchmesser der Außenverzahnung.
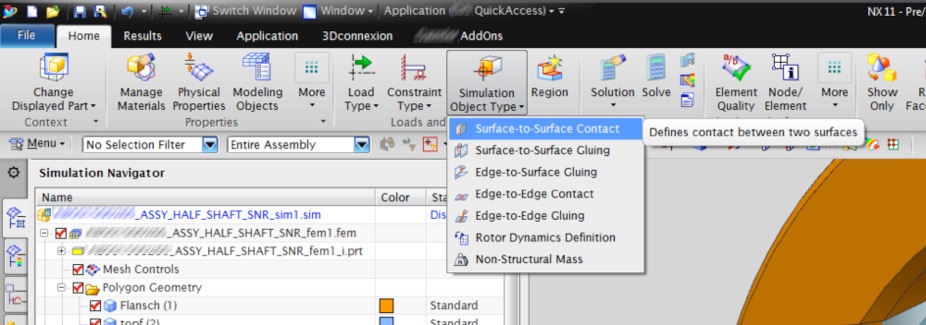
Kontakte definieren wir über den Befehl „Home/Simulation Object Type/Surface-to-Surface Contact“.
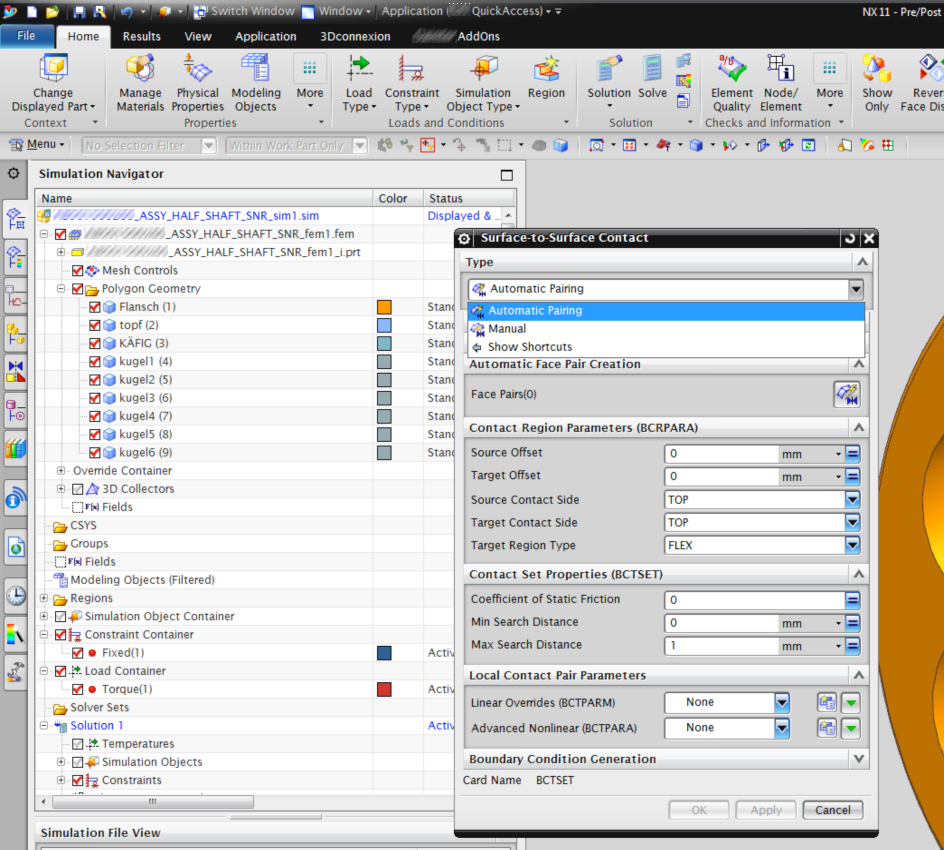
Im nächsten Dialogfenster wählen wir „Automatic Pairing“ aus.
Wir klicken auf den Knopf rechts neben „Face Pairs/Flächenpaare“.
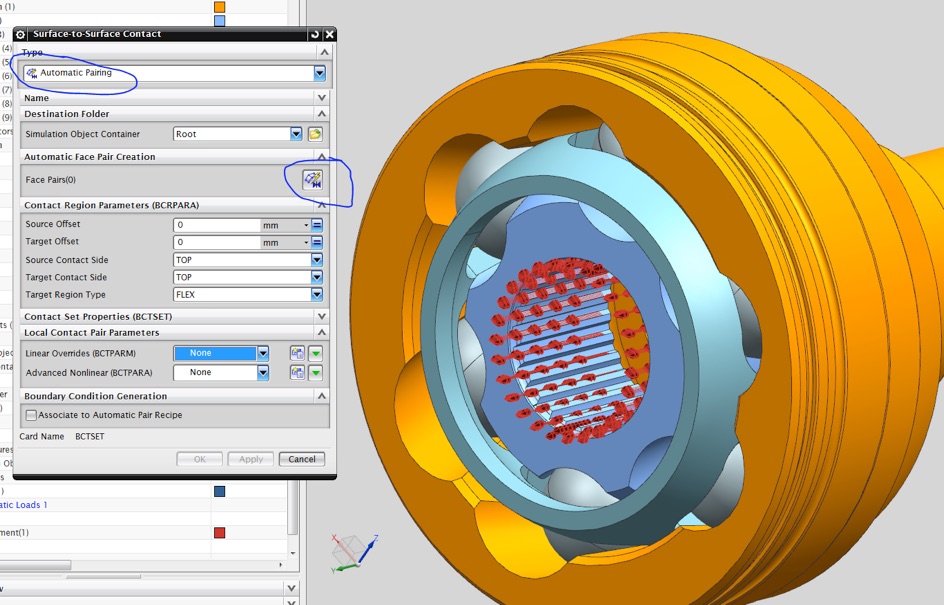
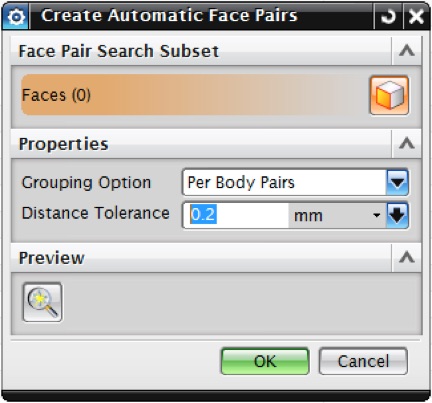
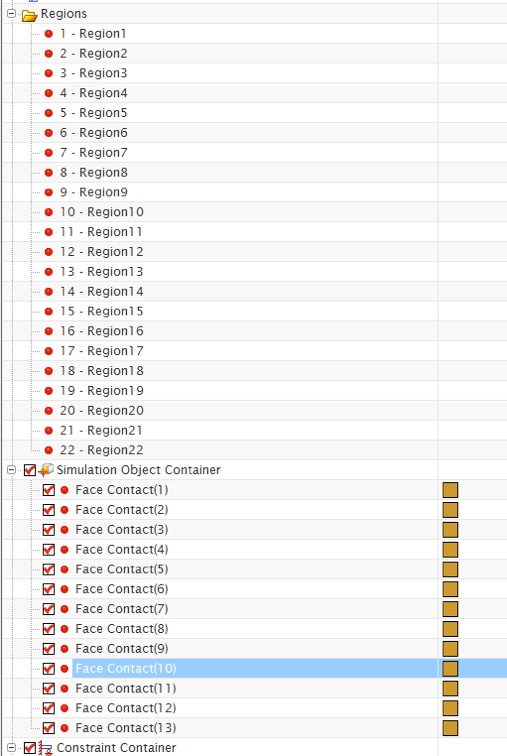
In diesem Fenster sollten alle Flächen von jedem Körper mit möglichen Kontakten angewählt werden. Es kann ein maximaler Suchabstand definiert werden, den potentielle Kontaktflächen haben können. Wenn beispielsweise 0,2 mm Suchabstand eingegeben wird, dann werden Flächen mit einem Abstand von 0,2 mm noch mit als Kontakt erkannt, Flächen die 0,3 mm oder mehr Abstand zueinander haben werden nicht gefunden. Diese Flächen ohne Kontakt können sich bei der späteren FE-Simulation durchdringen ohne dass es auffällt. Kommen gefundene Kontaktflächen nicht zu Anliegen so werden diese Kontakte im Laufe der Simulation abgeschaltet. Also im Zweifel lieber zu viele Kontaktflächen finden lassen als zu wenig.
Der Unterschied zur manuellen Kontaktfindung ist dass die korrekten Kontaktpaarungen automatisch auf einen Schlag erzeugt werden können. Muss man bei manueller Kontaktdefinition diese immer nacheinander erstellen.
Vernetzen
Der Strukturbaum der Netzdatei mit der Endung „*.fem“ sieht im Simulation Navigator wiefolgt aus:
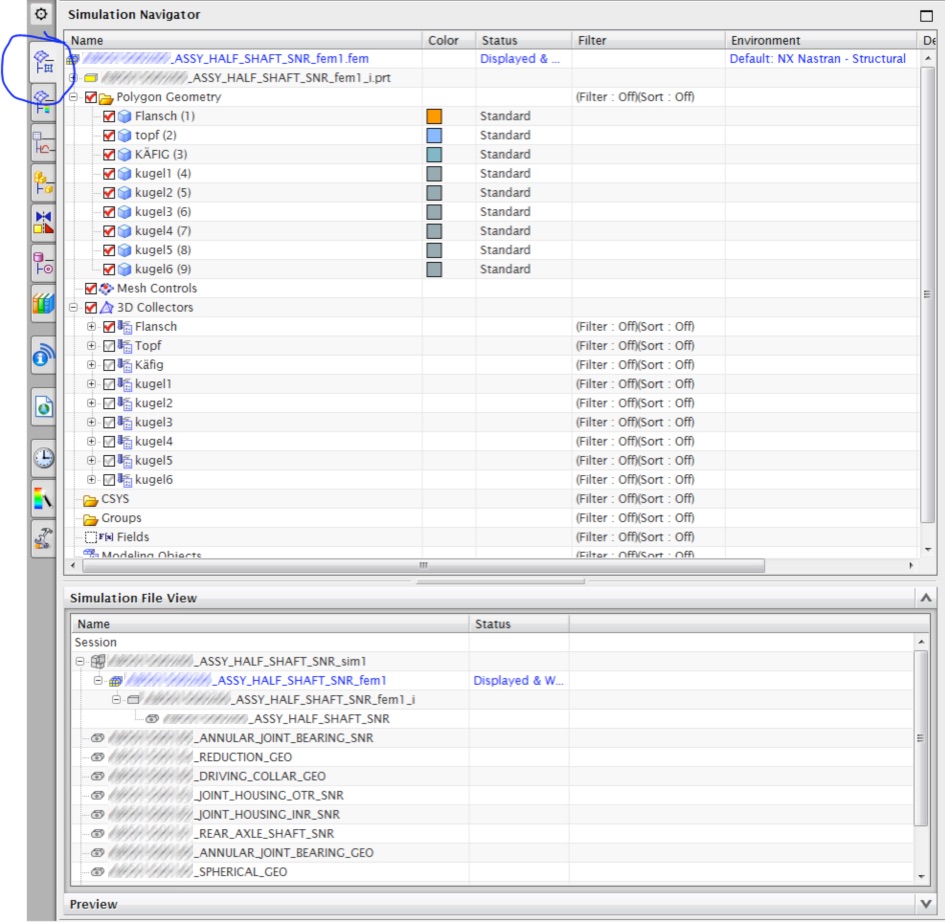
Oben unter dem Ast „Polygon Geometry“ werden alle 3D-Körper aufgelistet. Diese stammen aus der „*fem_i.prt“-Datei, also der Datei in der die für FE-Zwecke vereinfachten 3D-Körper vorliegen.
Wurden die Körper mit einem Netz versehen, so taucht ihr Netz im Ast „3D Collectors“ auf.
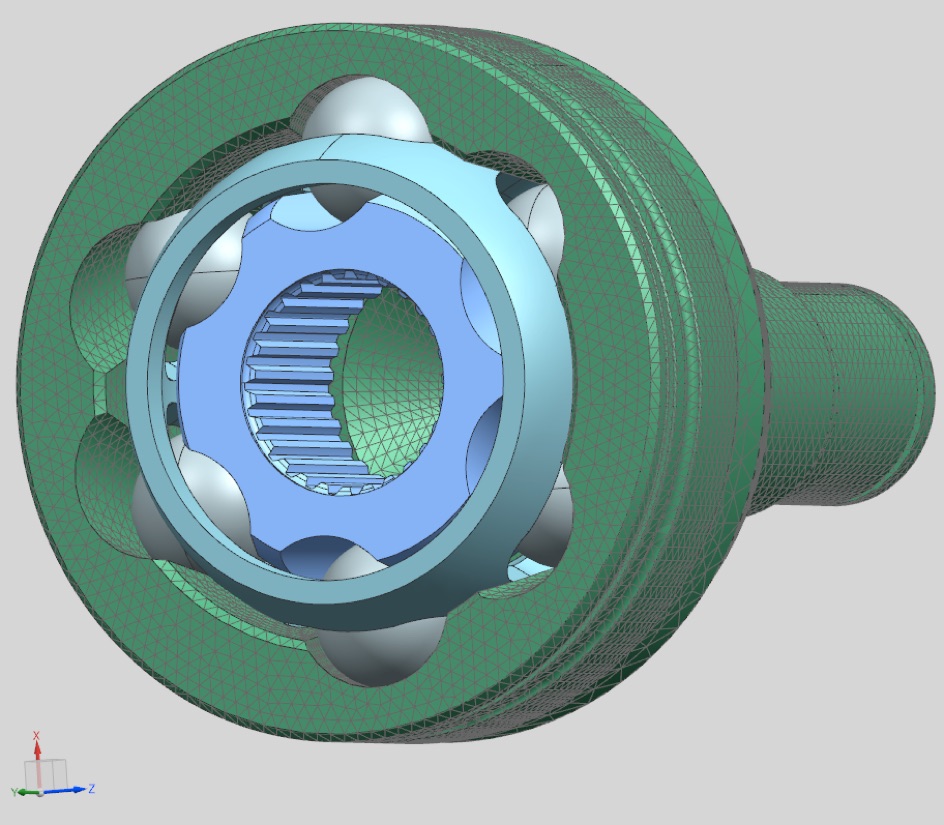
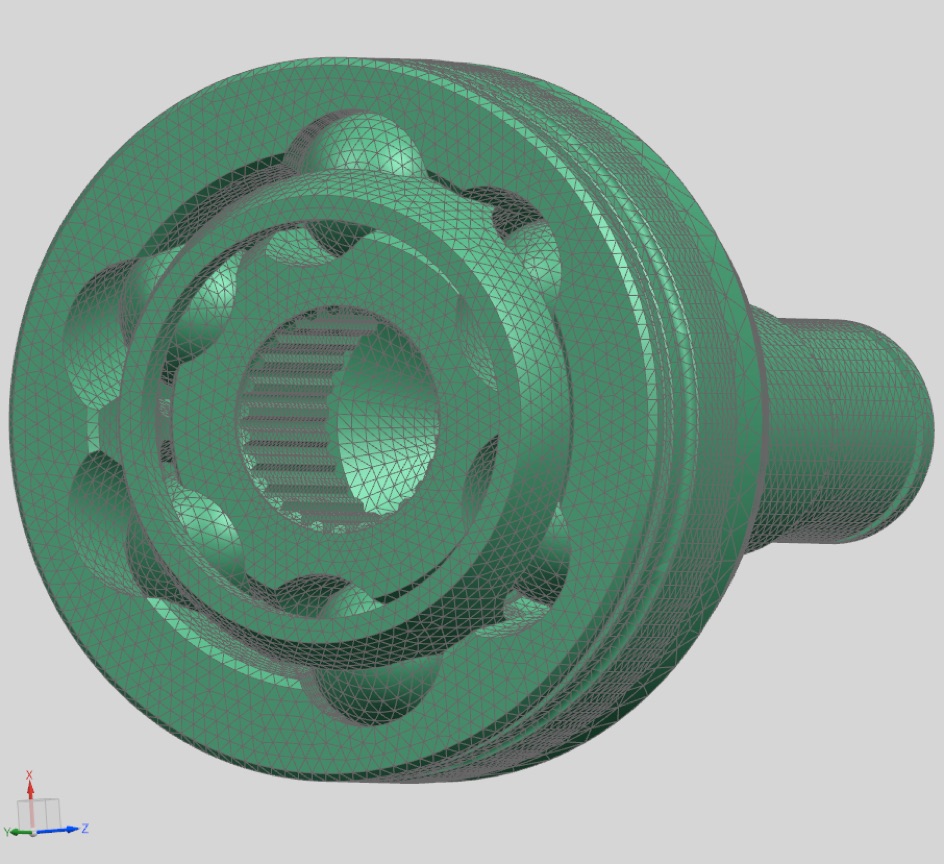
Blendet man alle Polygonkörper aus und alle vernetzten Körper ein, so kann man die Vernetzung gut optisch überprüfen.
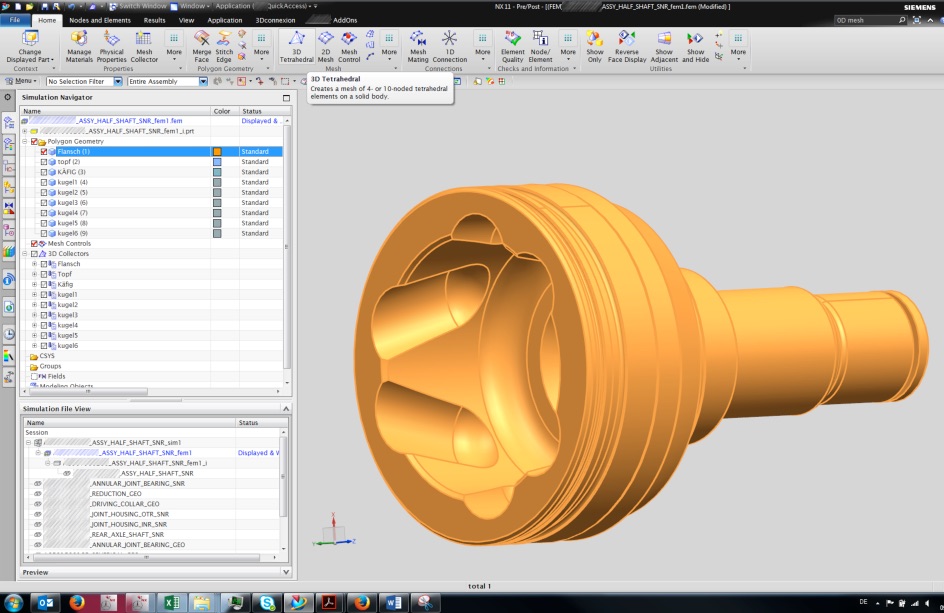
Um einen Polygonkörper zu vernetzen, wählen wir einen Körper im Strukturbaum aus und klicken in der Befehlsleiste unterhalb den Menüreitern auf den Befehl „3D-Tetraedal“ (Reiter Home).
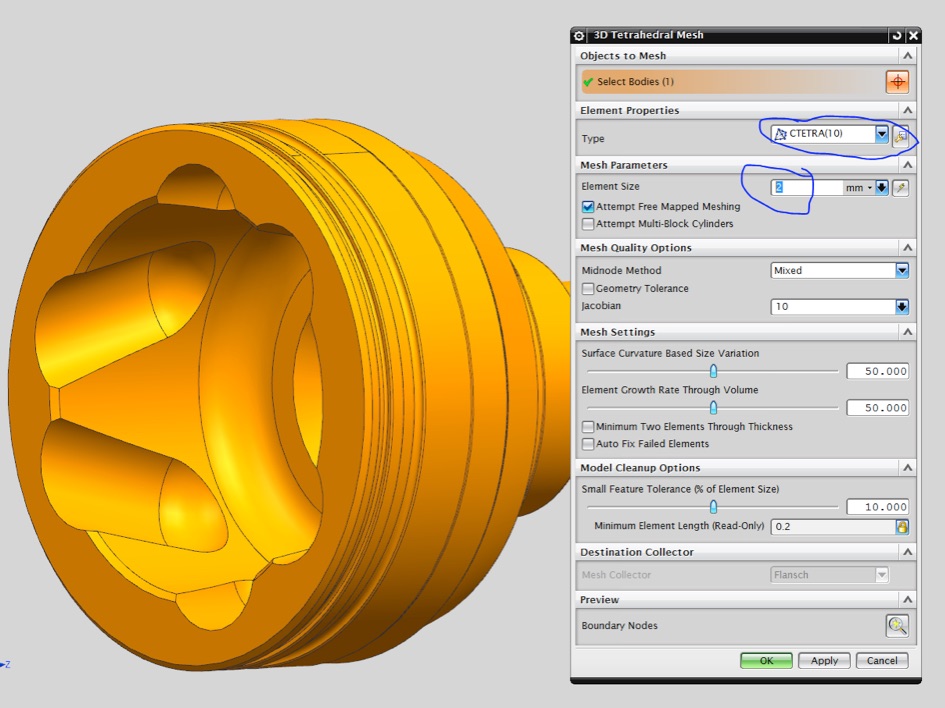
Es öffnet sich ein Dialog, bei dem besonders 2 Auswahlen interessant sind:
•Der Element-Typ CTETRA(10) ist ein Tetraederelement, dessen Knoten nicht nur aus den 4 Ecken besteht, sondern auch noch jeweils in der Mitte einer jeden Kante. Das macht in der Summe 10 Knoten. Das CTETRA(4)-Element ist dagegen ziemlich vereinfachend und ungenau.
•Die Elementgröße gibt die Netzauflösung vor. Eine Netzgröße von 2 mm ist recht grob vernetzt und eignet sich nur für überschlägige Berechnungen zur Modellkontrolle und zum Ermitteln von hochbelasteten Stellen. Wichtige Stellen können dann gezielt lokal feiner vernetzt werden, um realistischere Spannungsaussagen machen zu können.
Nach dem Bestätigen über die Knöpfe OK oder Apply/Anwenden wird die Vernetzung gestartet.