Dienstag, 24. November 2015


Pro/Mechanica-Modell einer Parksperre aufbauen
Eine Parksperre ist mit eines der kompliziertesten Bauteile innerhalb eines Getriebes. Sie besteht aus den „hochbelasteten Bauteilen“ und den Bauteilen des Betätigungsstrangs. Hier möchten wir zeigen, wie man die Belastungen der hochbelasteten Bauteile mittels
Pro/Mechanica ermittelt.
Am besten startet man, wenn man eine Baugruppe vorbereitet, in der sowohl die zu untersuchenden Bauteile und deren raumfeste Partner möglichst einbaunah eingebaut sind. Raumfestes Bauteil ist hier das Gehäuse – aufgrund der Komplexität der Geometrie wurde nur der relevante Teilbereich herausgeschmnitten.
-
1.Koordinatensysteme
Für die Modellierung der Einspannungen bzw. Verbindungen von Bauteilen dienen Randbedingungen. Doch bevor diese eingesetzt werden können, muss jeweils ein entsprechendes Koorinatensystem vorliegen. Es gibt grundsätzlich 3 verschiedene KS, wobei ich bislang mit zweien davon ausgekommen bin.
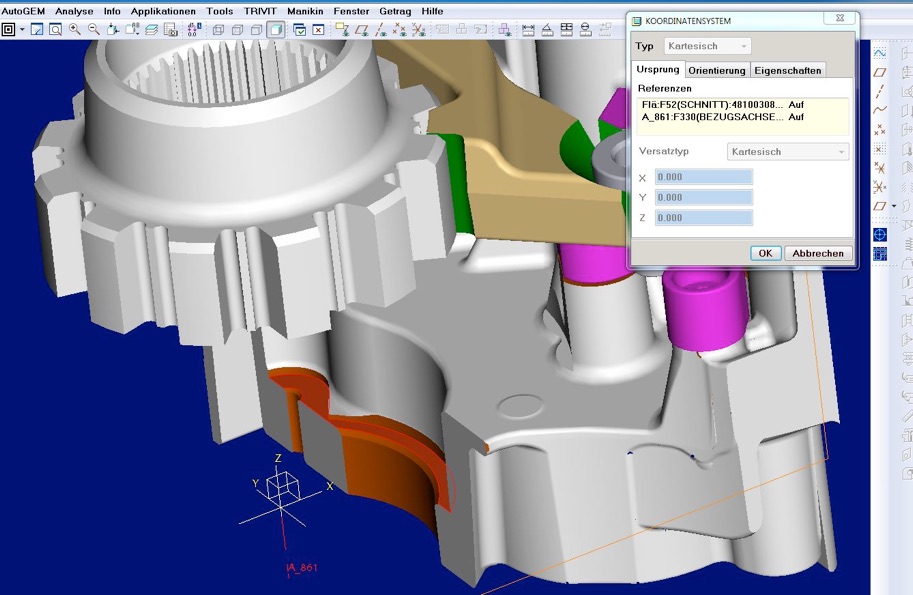
Das karthesische Koordinatensystem ist das bekannteste: es werden alle 3 Raumrichtungen mit den Achsen X, Y, Z definiert, welche senkrecht zueinander stehen. Ein Koordinatensystem kann auf einem Bauteil angelegt werden, indem dessen Ursprung es über 3 Punkte im Raum vorgegeben wird. Es kann auch eine Ebene und eine Achse angegeben werden, dann ist deren Schnittpunkt der Ursprung. Die Ausrichtung im Raum kann über den Reiter „Orientierung“ festgelegt werden.
Das karthesische KS ist gut für Festeinspannungen, Schubgelenke mit Flächen die senkrecht aufeinander stehen geeignet.
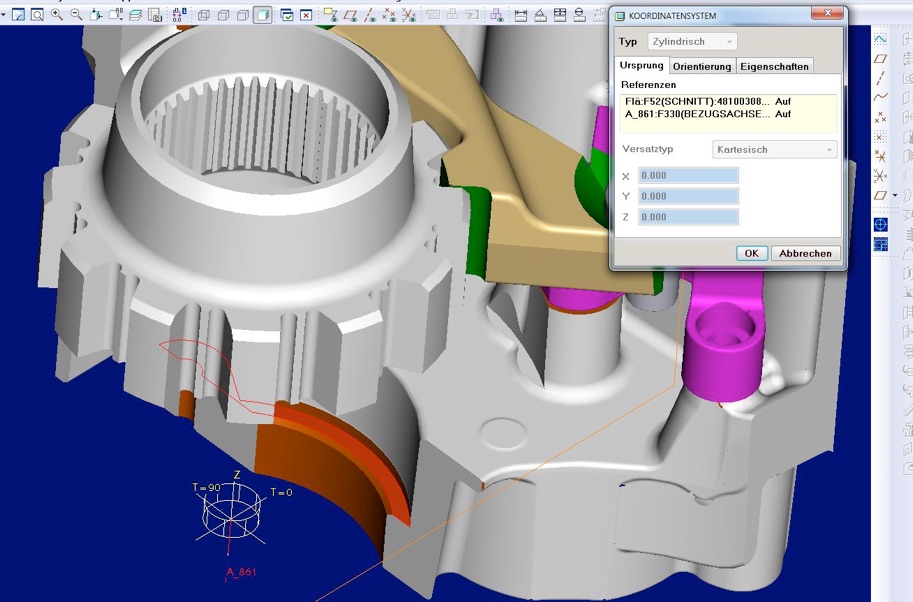
Derselbe Raumpunkt (Schnittpunkt Ebene mit Achse) kann auch im Zylinderkoodinatensystem belegt werden. Dann gibt es die Raumkoordinaten R, theta, Z. Für Drehgelenke eignet sich das Zylinderkoorinatensystem gut, da hier die Drehbewegung in theta-Richtung freigegeben und die radiale Auslenkung R und die axiale Auslenkung Z festgehalten werden kann.
Hier wird ein Zylinder-KS für die spätere Definition einer Drehbewegung der Sperrklinke im Getriebegehäuse erzeugt.
-
2.Randbedingungen festlegen
Die Bauteile liegen beim Umschalten von Pro/E auf Pro/Mechnaica optisch noch an ihrem Platz, jedeoch müssen alle Bauteile hier erneut in ihrer Einbaulage und ihrem Verhalten bestimmt werden.
-
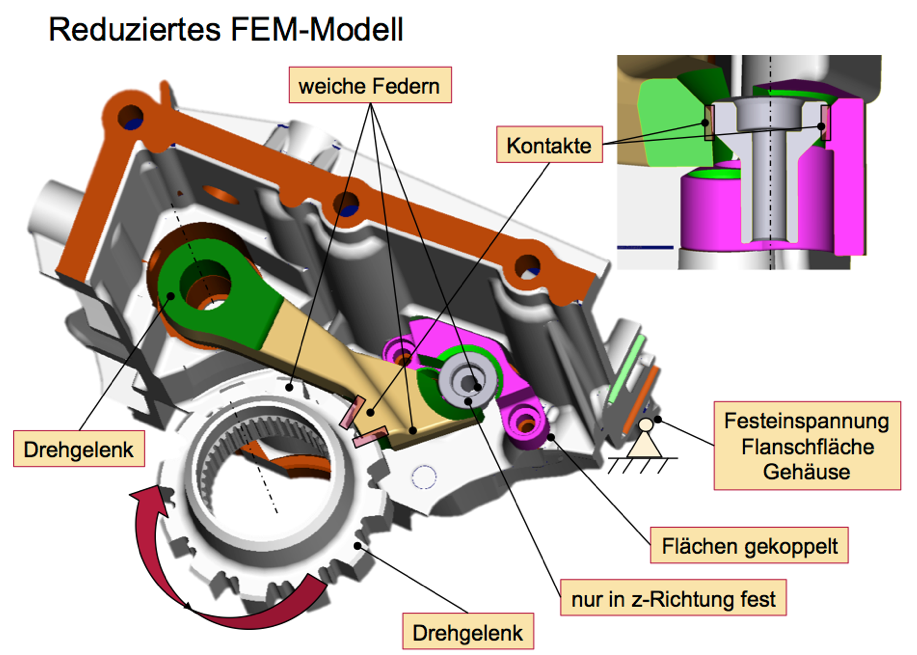
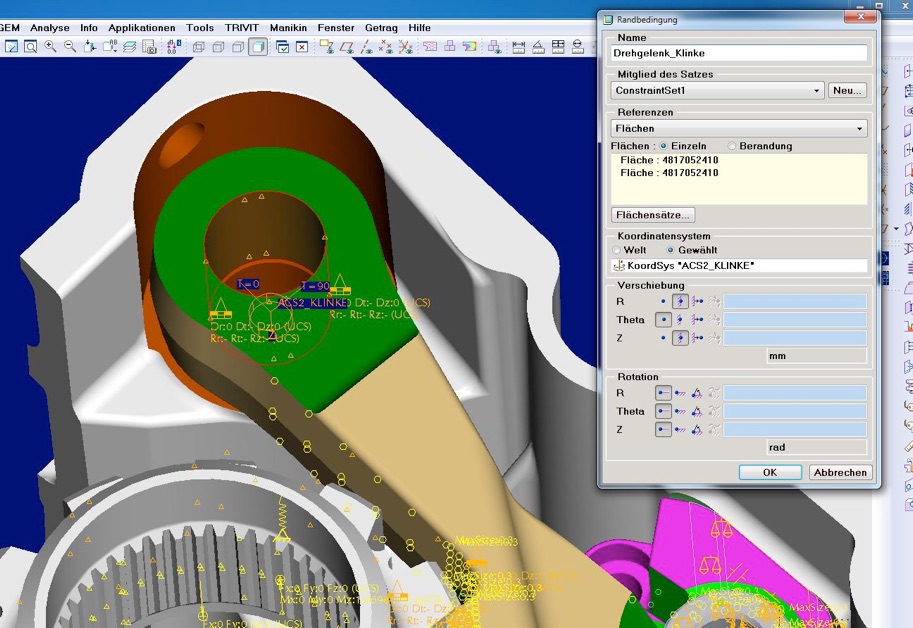
• Festeinspannungen können über das Menü „Einfügen/Verschiebungsrandbedingung“ definiert werden. Gegenüber dem Basiskoordinatensystem können Flächen festgesetzt werden. An diesen Stellen werden die FE-Ergebnisse ungenau werden und Spannungsüberhöhungen anzeigen, die in der Realität gar nicht auftreten. Das kommt daher weil es keine Fläche gibt, die bei Belastung wirklich starr ist sondern immer linear eleastisch. Aber dieser Fehler spielt keine Rolle da wir ja nicht dieses Bauteil untersuchen möchten, sondern die anderen Bauteile. Trotzdem wird irgendwo eine feste Einspannung im Raumkoordonatensystem benötigt.
-
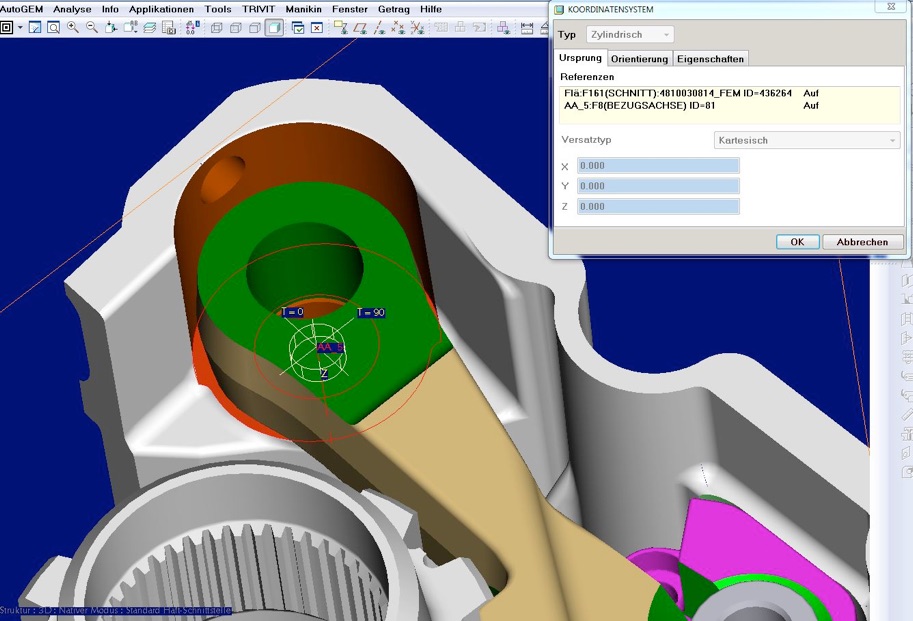
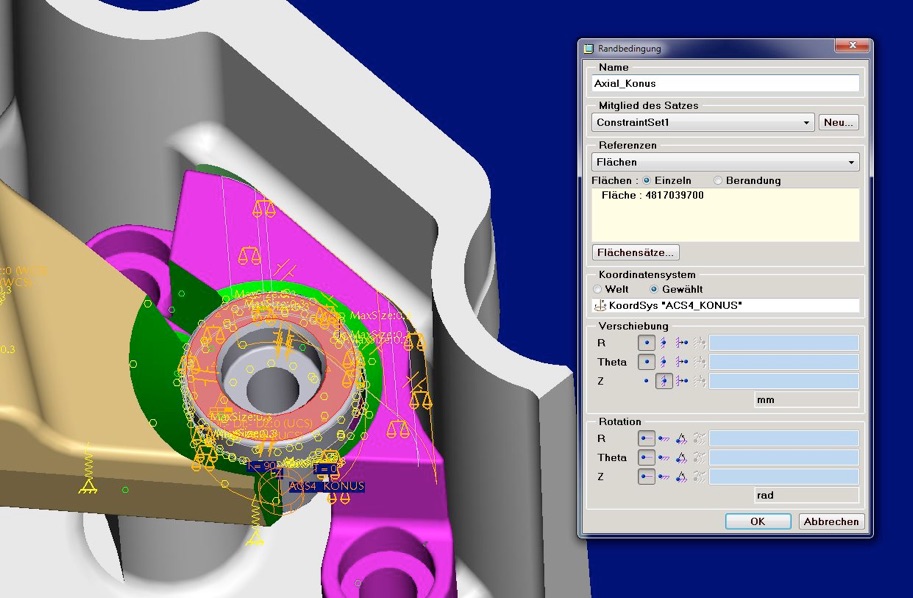
• Drehgelenke können über dasselbe Menü wie oben aufgerufen werden. Da das Raumkoodinatensystem aber karthesisch ist und wir eine Verschiebung in Winkelrichtung phi zulassen möchten, legen wir zuerst ein Zylinderkoorinatensystem in dem Bauteil selber an, welches über eine DRehbewegung gelagert werden soll. In unserem Falle legen ein solches Koordinatensystem an und platzieren es auf das Gehäuse.
Der Druckkonus wird einerseits über Kontakte mit den beiden benachbarten Bauteilen Gegenlager Konus und Sperrklinke radial ausgerichtet, nicht jedoch axial. Dazu wählen wir eine Fläche, eine Kante oder einen Punkt, der auf dem Druckkonus vorhanden sein muss und geben die schränken die axiale Bewegungsfreiheit komplett ein.
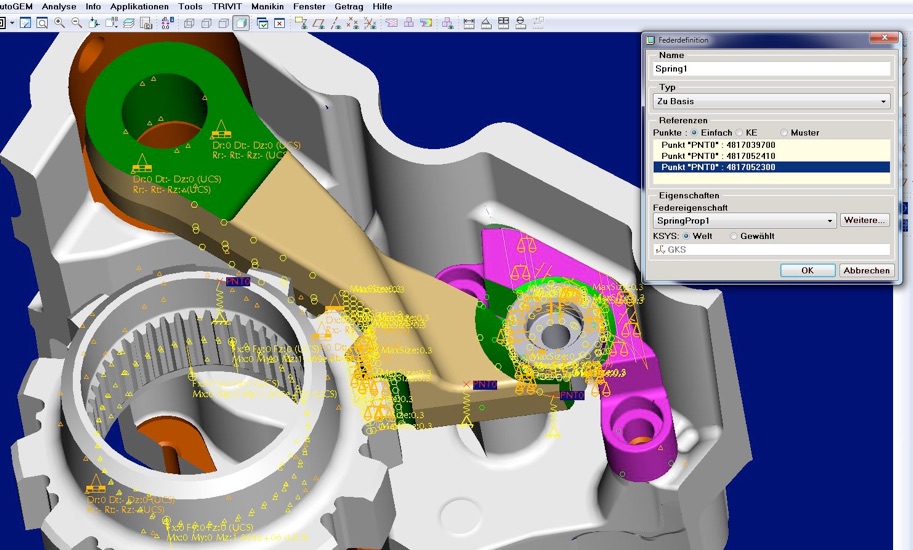
Aber auch die Drehbewegung wäre möglich, auch wenn in dieser Richtung kein Moment entsteht bzw. die Reibung in der Realität dies verhindern würde. Die Kontakte funktionieren aber nur ohne Reibung und eine Drehbewegung könnte entstehen. Um solche FE-typischen Bewegungsfreiheiten in den Griff zu bekommen, kann man ein Federelement an einen Punkt auf dem Körper legen, welches mit dem raumfesten Koodinatensystem (die Basis) verbunden ist. Es reicht eine extrem weiche Feder mit Federrate 1 N/mm aus.
-
3.Verbindungen erzeugen
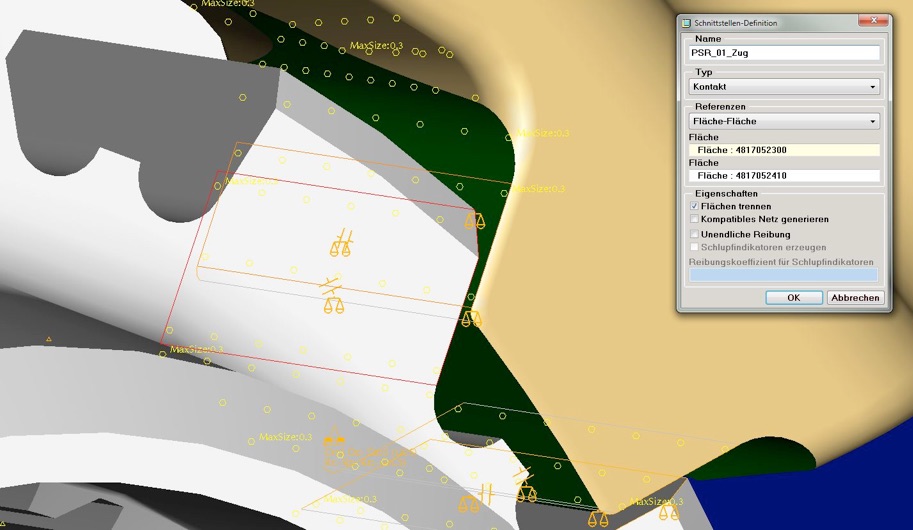
Die einfachste und zuverlässigste Methode zwei Körper miteinander zu koppeln sind dessen Kontaktflächen. Dabei kann Pro/Mechanica erkennen, ob Flächen zweier Körper innerhalb eines vorgegebenen Abstand sind. Dann werden diese Flächen als Kontakt erkannt und bei Berechnungen wird ein realistischer Kontakt entsprechend der Geometrie simuliert. Natürlich müssen den Bauteilen auch die korrekten Werkstoff-Kennwerte zugewiesen werden.
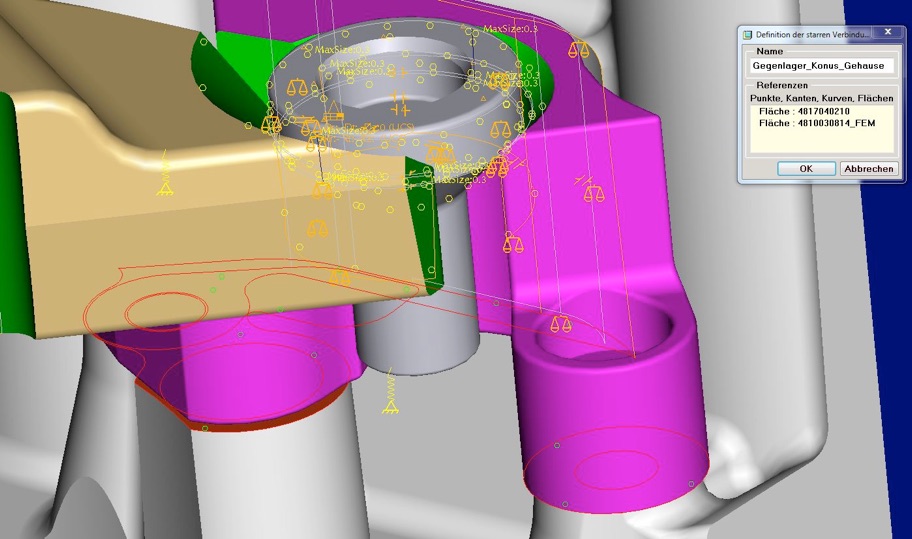
Andere Verbindungen sind die Koppelflächen. Diese Verbindung erleichtert die Modellbildung zwar, aber der Kontakt ist unnatürlich und damit stark fehlerbehaftet. Denn beim Koppeln können Flächen, Kanten oder Punkte zweier Körper fest im Raum zueinander wie eine Art „unsichtbare Verklebung“ verbunden werden. Der Abstand zwischen ihnen ist starr (was in der Realität nie der Fall ist).
-
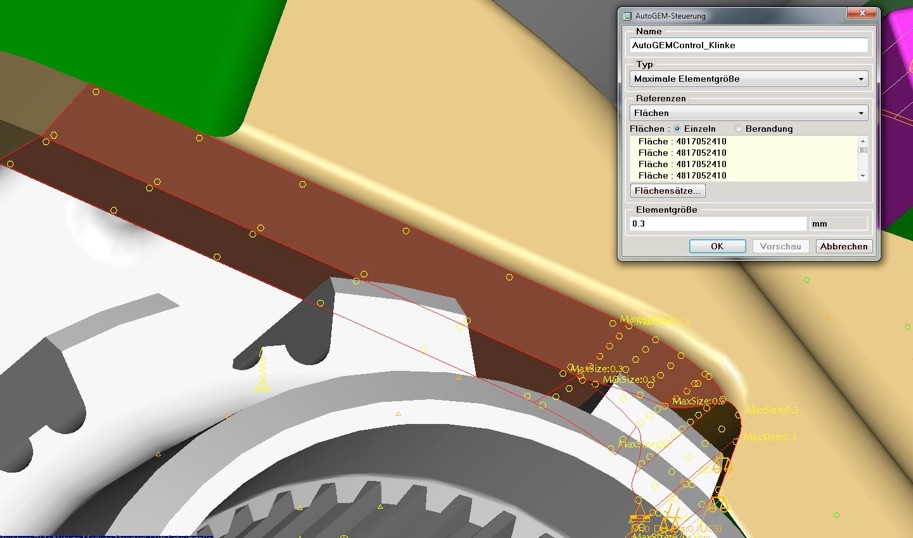
4.Vernetzen und die Netzsteuerung
Beim Starten der Finiten Elemente Berechnung werden die Bauteile automatisch in ein Fachwerk mit lauter kleinen Tetraeder-Elementen umgewandelt. Erst dann kann dieses „Fachwerk“ numerisch gelöst werden.
Einerseits sollten die Elemente nicht so klein sein, damit deren Zahl nicht überhand nimmt und mit dem vorhandenen Arbeitsspeicher auch berechnet werden kann. Andererseits werden die Ergebnisse umso ungenauer und die Spannungen niedriger, umso gröber die Vernetzung ist. Also macht es Sinn, in den Bereichen die von besonderem Interesse sind (Stellen mit hohen Spannungen, zu optimierende Geometriebereiche usw.) die Vernetzung lokal zu erhöhen.
Dazu dient die Netzsteuerung. Mit diesem Werkzeug könnne Flächen angeklickt und markiert werden und ihnen eine feinere Elementgröße (0,5mm) zugewiesen werden. Dann ist das Ergebnis an diesen Stellen deutlich besser.
-
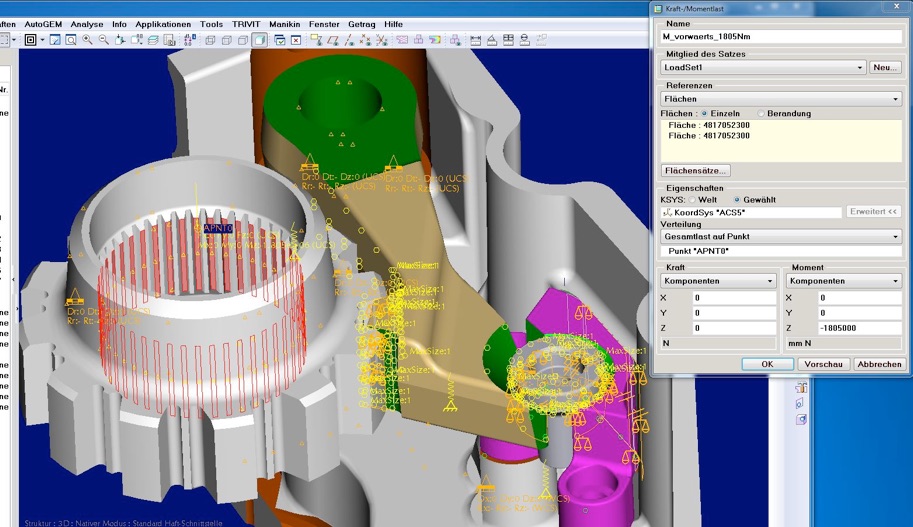
5.Einleiten von Drehmoment
Das Einleiten von Drehmoment ist nicht ganz so einfach wie das Aufbringen von Kraft auf eine Fläche. Es wird ein Punkt auf der Achse in dem Bauteil benötigt, auf welches das Drehmoment aufgeprägt werden soll. Wir wählen eine Zylinderfläche aus (in diesem Beispiel die Steckverzahnung) und Ändern bei „Verteilung“ auf „Gesamtlast auf Punkt“.
Dann wählen wir den vorher angelegten Punkt aus und geben unter „Moment“ das aufgeprägte Drehmeoment ein. Bitte die Einheit Nmm beachten.