Freitag, 9. Juni 2017


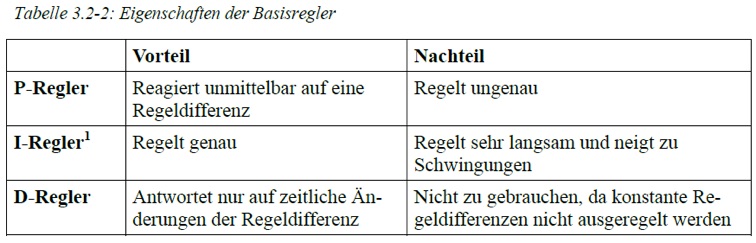
Vorstellung der Basis-Regler-Typen
Die Basisregler banötigen als Eingang das Delta aus Führungsgröße und Messgröße, um dann am Ausgang eine zu diesem Delta abhängige Stellbgröße auszugeben. Durch die Rückkopplung wird die Messgröße beeinflusst und damit das Delta wiederum beeinflusst. Der Regler ändert laufend die Stellgröße im Rahmen seiner Leistungsfähigkeit. Der Stellbereich kann zwischen den beiden Stellwertgrenzen variieren.
Der P-Regler
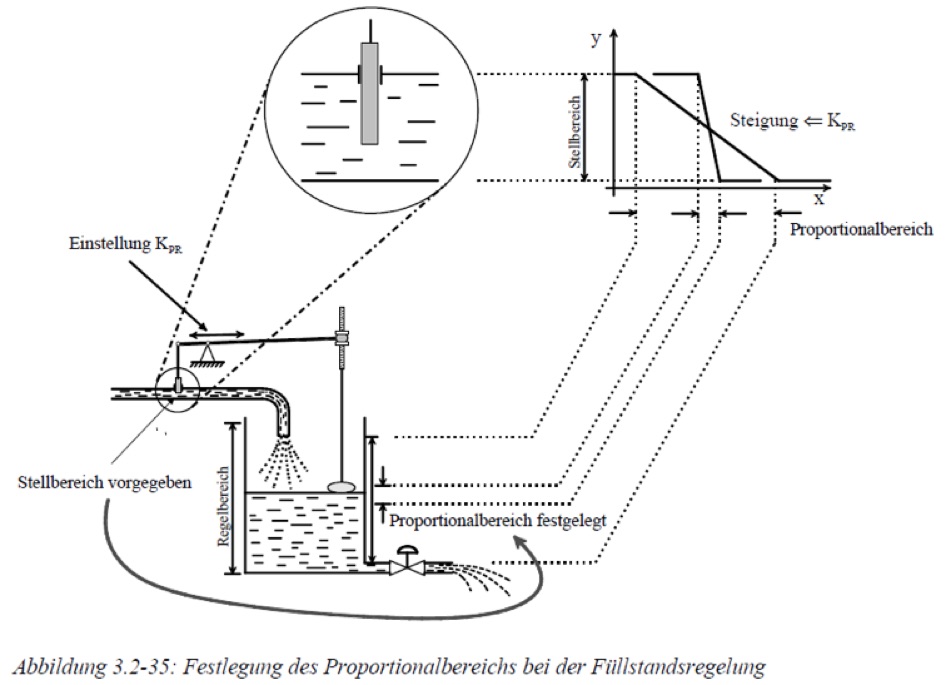
Der einfachste Regler ist der P-Regler, er benötigt als Eingang das Delta aus Führungsgröße und Messgröße, um dann am Ausgang ein zu diesem Delta proportionalen Stellbereich auszugeben. Durch das reine Proportionalglied erkennt der Regler Abweichungen langsamer, nämlich wenn diese einen gewissen Betrag erreicht haben. Die messtechnischen Schwankungen des Messsignals kann er nicht erfassen, sondern er reagiert auf den Mittelwert.
•Der P-Regler kann Störungen der Regelstrecke nicht ausregeln. Er ist deshalb ungenau und hinterlässt eine bleibende Regeldifferenz
•Der P-Regler reagiert aber unmittelbar und schnell auf jede Veränderung der Regelgröße
•Ergebnis: der P-Regler arbeitet ungenau
"Je größer die Missachtung bzw. Abweichung zu einem Gebot ist, desto größer fällt die Strafe bzw. Gegenreaktion aus."
Folgende Reaktionsschritte laufen ab:
(1) Die Wasserhöhe sinkt.
(2) Es tritt eine Differenz zwischen Führungs- und Regelgröße auf, die über den Schwimmer festgestellt wird.
(3) Der P-Regler (Hebel) öffnet das Ventil, so dass frisches Wasser nachfließen kann.
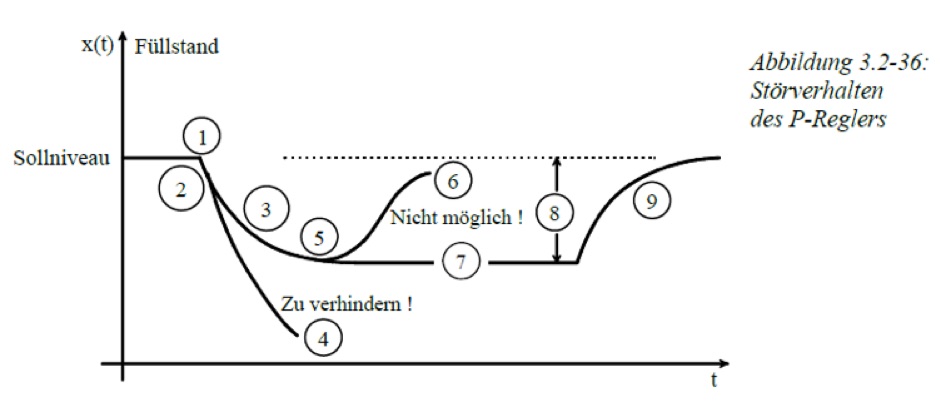
(4) Wird mehr Flüssigkeit entnommen als nachfließen kann, entleert sich der Behälter. Dieses muss verhindert werden.
(5) Je weiter das Niveau sinkt umso mehr Frischwasser fließt nach, um wieder den alten Stand zu bekommen.
(6) Das vorherige Sollniveau wird aber nicht wieder erreicht, da sonst das Ventil wieder soweit geschlossen wäre und deshalb zu wenig Frischwasser nachfließen könnte, um die immer noch vorhandene starke Entnahme auszugleichen.
(7) Das Wasserniveau pendelt sich deshalb auf einem neuen Gleichgewichtszustand ein, bei dem die Regelgröße nicht der Sollgröße entspricht.
(8) Es tritt eine konstante Differenz zwischen Soll- und Istgröße ein, die als bleibende Regeldifferenz bezeichnet wird. Der P-Regler benötigt sie zum Ausgleich der Störung.
(9) Nur die Aufhebung der Wasserentnahme lässt den Füllstand erneut auf das alte Niveau anwachsen.
Der I-Regler reagiert auf das Integral des Delta aus Führungsgröße und Messgröße. „Je länger eine Abweichung von einem Sollzustand andauert, umso größer fällt die Gegenreaktion aus.“ Der I-Regler stellt ein dynamisches System dar, das eine zum Zeitintegral der Regeldifferenz proportionale Stellgröße erzeugt.
Der I-Regler
Beim I-Regler wird die Regeldifferenz über die Zeit aufsummiert. Eine Regeldifferenz wirkt sich erst allmählich auf die Stellgröße aus. Er wirkt deshalb verzögernd. Die Verzögerungszeit wird maßgebend vom Integrierbeiwert KIR bestimmt. Je größer der Integrierbeiwert ausfällt, umso schneller verändert er das Stellsignal. Die sich ergebende Zeitkonstante bezeichnet man als Integrierzeit TIR. Sie berechnet sich zu:
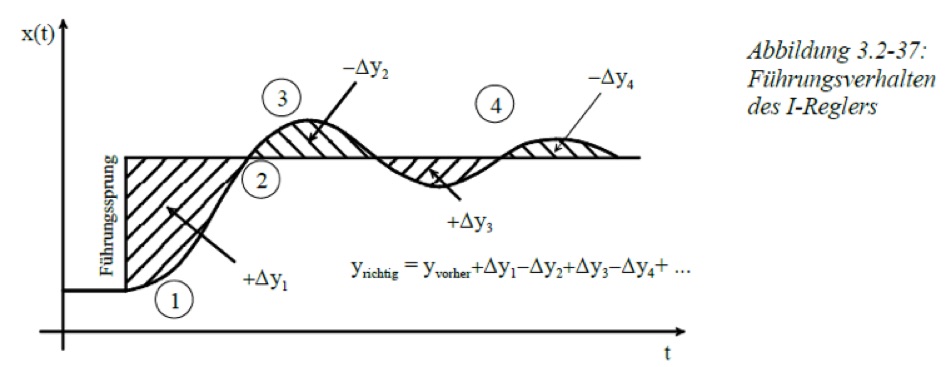
Im Einzelnen laufen folgende Regeleinflüsse ab:
(1) Die durch den Führungssprung auftretende Regeldifferenz summiert der I-Regler über die Zeit zu einer positiven Stellgrößenänderung +Dy1 auf. Dieses Integral fällt vorerst willkürlich aus, da dem I-Regler die Streckeneigenschaften unbekannt sind.
(2) Das Stellsignal schießt über den exakten Stellwert zur Einstellung der Regelgröße hinaus, weshalb diese ebenfalls ihr Ziel verfehlt.
(3) Der Regler hat die Stellgröße um –Dy2 zu korrigieren.
(4) Da der Regelalgorithmus zwingend eine verschwindende Regeldifferenz verlangt, schwingt die Regelgröße eine längere Zeit bis zur endgültigen Übereinstimmung um den Sollwert.
Die Stellgröße y(t) wird sukzessive um die Beiträge +Dy3, –Dy4, usw. verändert, bis der richtige Stellwert gefunden ist. Der Regelvorgang kann nur durch die Erhöhung des Integrierbeiwerts KIR zeitlich verkürzt werden. Die Schwingneigung steigt dann aber weiter an, denn im Übereifer schießt der Regler weit über das Ziel hinaus und muss sich immer wieder korrigieren.
•Der I-Regler stellt die Regelgröße exakt auf die Führungsgröße ein
•Im Gegensatz zum P-Regler benötigt der I-Regler um die Integrierzeit TIR länger für den Regelvorgang
•Zur exakten Erreichung der Führungsgröße neigt ein I-Regler zu Schwingungen
•Ergebnis: Der I-Regler regelt präzise aber langsam und neigt zum Schwingen!
Der D-Regler
Der D-Regler reagiert nur auf zeitliche Änderungen der Regeldifferenz e(t) durch ein der Änderungsgeschwindigkeit proportionales Stellsignal:

„Je schneller eine Abweichung entsteht, umso größer fällt die Gegenreaktion aus.“
Leider muss für ihn die Einschränkung festgestellt werden:
Der D-Regler regelt zeitlich konstante Regeldifferenzen nicht aus, gleich wie groß diese auch ausfallen. Für ihn gilt deshalb: Der D-Regler ist für sich alleine nicht zu gebrauchen!
Der D-Regler allein ist zur Regelung von Prozessen prinzipiell ungeeignet, denn eine zeitlich konstante Regeldifferenz e0 an seinem Eingang ruft überhaupt keine Reaktion hervor, da das Differential der Regeldifferenz verschwindet. Erst im Zusammenwirken mit P- und I-Regelverhalten kann der D-Regler seine Wirkung voll entfalten.
Damit kommen wir zu den kombinierten Reglern, die in der Lage sind die eigenen Nachteile in der Summe zu reduzieren.
Der PI-Regler
Die Kombination von P- und I-Regler lässt einen schnell eingreifenden und präzise ausregelnden Regler erwarten. Er wird durch die Parallelschaltung von P- und I-Regler realisiert. Im PI-Regler überlagern sich die Wirkungen von P- und I-Reglern durch Parallelschaltung:
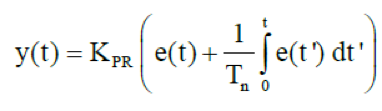
Seine beiden Kenngrößen Proportionalbeiwert KPR und Nachlaufzeit Tn nehmen als verstellbare Regelparameter Einfluss auf die Regelgüte des Regelkreises. Sie sind über die Systemgleichung (3.2-14) miteinander gekoppelt. Für die Nachlaufzeit gilt:
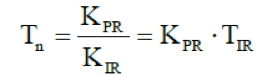
Durch die Verstellung von KPR (bzw. des Proportionalbereichs XP) ändert sich durch die Nachlaufzeit Tn auch die Wirkung des I-Reglers. Eine kürzere Nachlaufzeit verstärkt die integrierende Wirkung des PI-Reglers.
Die Abbildung 3.2-38 zeigt das Blocksymbol des Reglers mit seiner Übergangsfunktion.
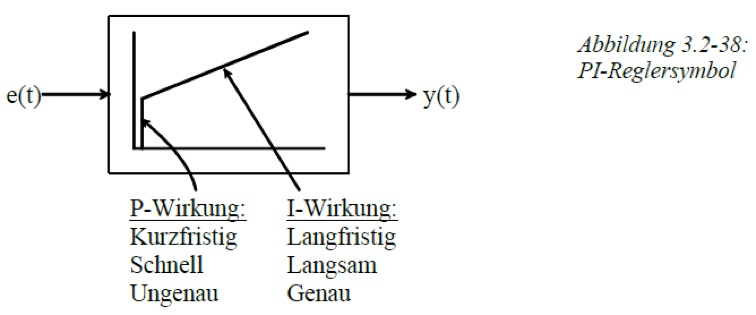
Es zeigt die unmittelbare Reaktion des P-Reglers durch die Vorgabe eines definierten Stellwerts. Anschließend entfaltet der I-Regler seine Wirkung, die erst nach der Nachlaufzeit Tn denselben Einfluss auf die Regelstrecke ausübt. Seine aufsummierende Eigenschaft bringt die noch verbleibende Regeldifferenz zum Verschwinden. In nachfolgender Abbildung erkennt man sein Führungsverhalten bei einer verzögernden P-Strecke:
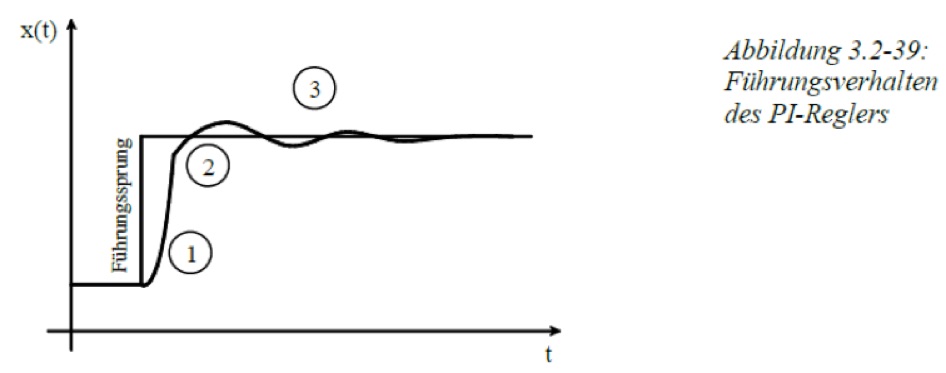
Während den markierten Zeitabschnitten dominieren folgende Wirkmechanismen:
(1) Zu Beginn des Führungssprungs wirkt der P-Regler und versucht die Regelgröße in die Nähe des neuen Sollwerts zu drängen.
(2) Dort beginnt dann der I-Regler seinen Einfluss auszuüben. Er integriert fortlaufend die bis dato anfallende Regelfläche auf und fügt sie dem Stellsignal hinzu.
(3) Durch die Nähe zum neuen Sollwert benötigt der Regler weniger Zeit, sich exakt auf die Führungsgröße einzuschwingen.
Die Vorzüge vom PI-Regler liegen somit auf der Hand:
•Der P-Regleranteil versucht eine auftretende Regeldifferenz schnell abzufangen, ohne dass er sie vollständig eliminiert.
•Anschließend beseitigt die I-Reglerkomponente die restliche Regeldifferenz.
•Ergebnis: Der PI-Regler arbeitet schnell und präzise
PI-Regler dienen vielen Regelstrecken zur optimalen Kontrolle, weshalb sie in der Regelungstechnik eine bedeutende Rolle spielen. Aus diesem Grund sind nachfolgend zwei technische Realisierungen dargestellt.
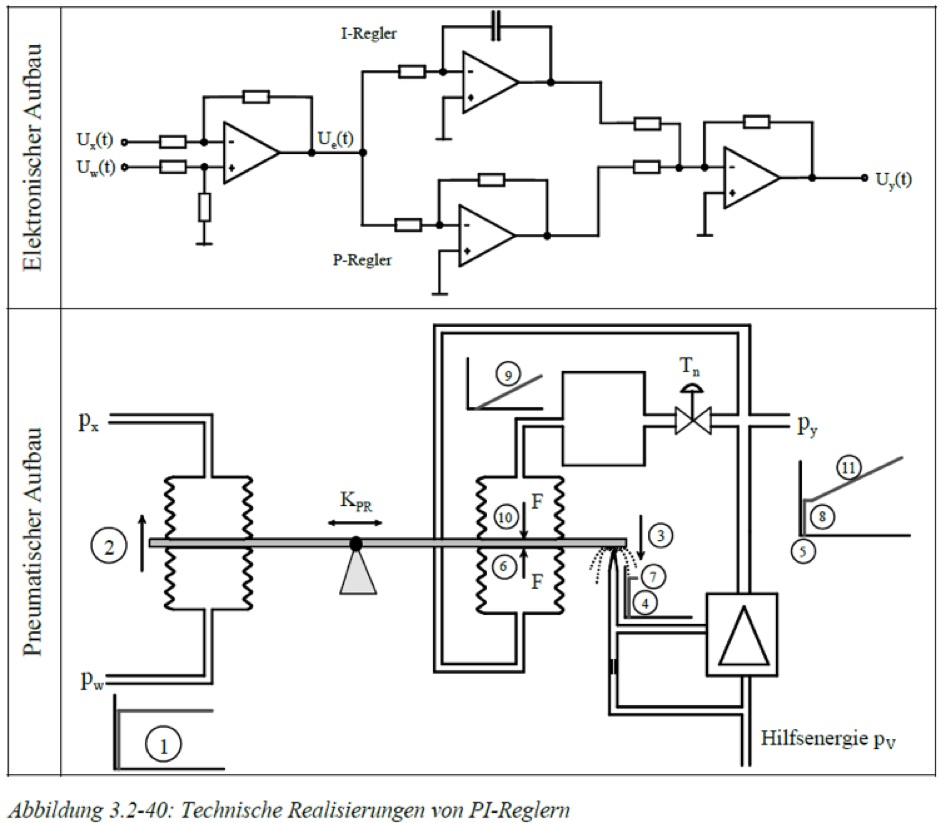
Der elektronische Regler setzt sich aus einer Integrationsschaltung als I-Regler, einer Verstärkerschaltung als P-Regler und der Additionsschaltung zusammen. Den Eingang in die Reglerschaltung bildet eine Vergleichseinrichtung als Differenzverstärkerschaltung. Die Reglerkennwerte werden mit einstellbaren Widerstands- und Kondensatorwerten vorgegeben.
Die pneumatische PI-Regeleinrichtung arbeitet mit dem Düse-Prallplatte-Prinzip. Der Verstärkungsfaktor KPR bzw. der Proportionalbereich XP wird mittels des Drehpunkts eingestellt. Eine Druckwaage vergleicht die Regel- und die Führungsgröße px(t) bzw. pw(t) miteinander. Bei Ungleichheit verändert sich die Spaltbreite zwischen Düse und Prallplatte. Sie gibt den Druck im Düsenrohr vor, den ein Druckverstärker auf ein höheres Niveau transformiert. Je weiter die Prallplatte die Düse verschließt, desto höher steigt der Druck, der unmittelbar als Stelldruck weitergegeben wird. Der Rückkopplungsweg über Drosselventil, Druckbehälter bzw. Balg und das weitere Verschließen des Düsenspalts veranlassen das weitere Anwachsen des Ausgangsdrucks. Die Integriereigenschaft wird über diesen Gegenzweig erzielt. Die Nachstellzeit Tn gibt man durch die Verstellung des Drosselventils vor. In Abbildung 3.2-40 sind die nacheinander auftretenden Wirkungsschritte mit ihren Zeitverhalten eingezeichnet.
Der PD-Regler
Die Genauigkeit von P-Reglern lässt sich durch Hinzufügung integrierender Verhalten steigern. Differenzierende Verhalten steigern i. Allg. die Schnelligkeit von Systemen, weshalb zu vermuten ist, dass P- und D-Regler zusammen kürzere Reaktionszeiten erwarten lassen:
Der ideale PD-Regler addiert die Wirkungen von P- und D-Reglern. Seine Systemgleichung lautet:

Der Proportionalbeiwert KPR bzw. Proportionalbereich XP und die Vorlaufzeit Tv beschreiben seine Kennwerte und bestimmen als verstellbare Regelparameter die Regelgüte des Regelkreises.
Sie bedingen sich gegenseitig wegen der Abhängigkeit:
Die Verstellung von KPR (bzw. des Proportionalbereichs XP) ändert auch die Wirkung des D-Verhaltens. Eine längere Vorlaufzeit verstärkt die differenzierende Wirkung des PD-Reglers. Er reagiert auf Änderungen der Regeldifferenz schneller. Tritt eine sprunghafte Regelabweichung auf, so erzeugt der D-Anteil eine unmittelbare und kräftige Gegenreaktion auf die Regelstrecke, die anschließend wieder zurückgenommen wird. Der Proportionalregler kontrolliert die weitere Zeitentwicklung. Der P-Regler entfaltet erst nach der Vorhaltezeit TV dieselbe Wirkung.
Die schnelle Reaktion des D-Reglers sowie die Ungenauigkeit des P-Reglers lassen keine Präzision erwarten. Der PD-Regler wird eine bleibende Regeldifferenz zurücklassen, so dass seine Eigenschaften zusammengefasst werden können:
•Der D-Anteil wendet durch Vorhalt die „größte Gefahr“ von der Regelstrecke ab.
•Der P-Anteil bestimmt sein langfristiges Verhalten, weshalb er ungenau arbeitet.
•Ergebnis: Der PD-Regler reagiert sehr schnell, aber ungenau!
Die Übergangsfunktion des PD-Blocksymbols bringt diese Dynamik zum Ausdruck:
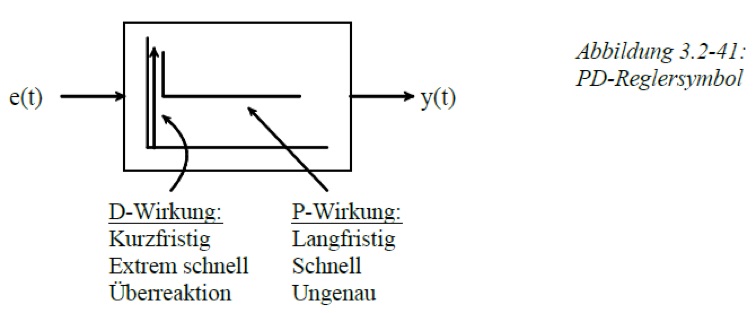
Die Reaktion auf das Sprungsignal beantwortet der PD-Regler mit einer extrem schnellen Überreaktion. Der P-Regler versucht dann das Zuviel zu korrigieren. Wie man sieht, liegt ein idealisiertes Verhalten vor. Technisch lässt sich die differenzierende Wirkung nicht erzielen. Der idealisierte Nadelimpuls d(t) am Beginn des Übergangs reduziert sich zu einem „verschmierten“ Impuls, der eine endliche Amplitude aufweist. Der ideale PD-Regler ist trotzdem von theoretischem Interesse.
Der PID-Regler als Universalregler
Die Gesamtkombination aller drei Basisverhalten ergibt für viele Regelaufgaben einen optimal einsetzbaren Regler. Durch den PD-Anteil wird ein sehr schnelles Einstellen auf sich ändernde Führungswerte erzielt, während der I-Anteil die Präzision liefert.
Der PID-Regler kombiniert alle drei Basisregler zu einem universellen Regler durch Parallelschaltung von P-, I- und D-Reglern. Seine Systemgleichung lautet:
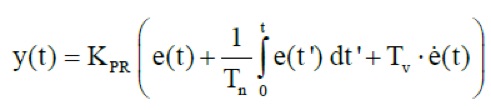
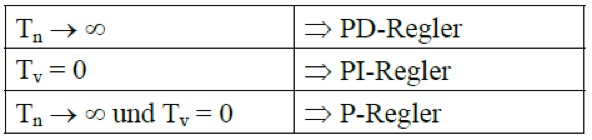
Die drei Kennwerte KPR, Tn und Tv bestimmen sein Verhalten. Dementsprechend schwierig ist seine Parametrierung für einen zu entwerfenden Regelkreis. Durch richtige Wahl der Kennwerte können auch alle anderen Reglertypen realisiert werden:
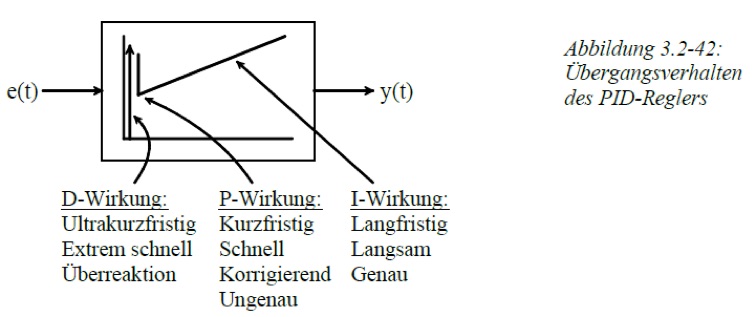
Durch die Parametervielfalt ist der Regler an alle Regelstrecken am besten anpassbar. Zu seinen Ungunsten zählt einzig der zu treibende Aufwand bei seiner Einrichtung und Parametrierung. Beim PID-Regler summieren sich die Vorteile aller drei Grundregler. Die Abbildung 3.2-43 zeigt sein Blocksymbol als Übergangsfunktion, die gleichzeitig dessen Eigenschaften versinnbildlicht:
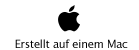
Diese drei Wirkungseigenschaften lassen sich auf einen Führungssprung bei einem Regelkreis mit verzögernder Regelstrecke deutlich machen:
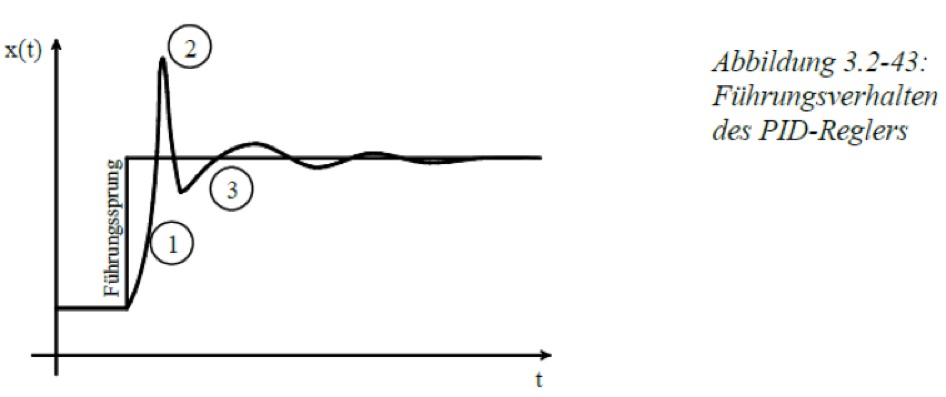
(1) Der D-Regler steuert die Regelgröße so schnell es geht in Richtung veränderter Führungsgröße, wobei er über das Ziel hinaus schießt.
(2) Der P-Regler korrigiert die Regelgröße in Richtung Sollgröße. Er hinterlässt eine Regeldifferenz, da er bekanntlich ungenau arbeitet.
(3) Nun beginnt der I-Regler zu wirken. Da keine große Abweichung mehr vorliegt, hat er leichtes Spiel, die Regeldifferenz schnell zu beseitigen.
Der differenzierende Wirkanteil des PID-Reglers bietet den Vorteil, die Regelgröße sehr schnell der Führungsgröße nachzuführen. Man verwendet ihn deshalb, um Gefahrensituationen für Mensch und Maschine abzuwehren.
Für den Regler lässt sich summa summarum feststellen:
•Der PID-Regler kann optimal an verschiedene Regelstrecken angepasst werden.
•Er reagiert auf Regeldifferenzen durch schnelles Vorhalten, gezieltes Anfahren in die Nähe des Sollwerts und abschließendem präzisen Ausregeln der Regeldifferenz
•Ergebnis: DER PID-Regler kann als Universalregler bezeichnet werden!
Der PID-Regler nimmt in der Regelungstechnik die Spitzenposition ein. Wie sieht es aber mit seiner Realisierbarkeit aus?
Aus der Systemtheorie (Kapitel 2) wissen wir, dass Systeme die Kausalitätsbedingung erfüllen müssen. Sie ist dadurch gegeben, dass für die Zähler- und Nennerpolynome der Übertragungsfunktion G(s) die Eigenschaft gelten muss:
Der Grad des Zählerpolynoms darf höchstens vom Grad des Nennerpolynoms sein.
Die Übertragungsfunktion eines PID-Reglers berechnet sich zu:
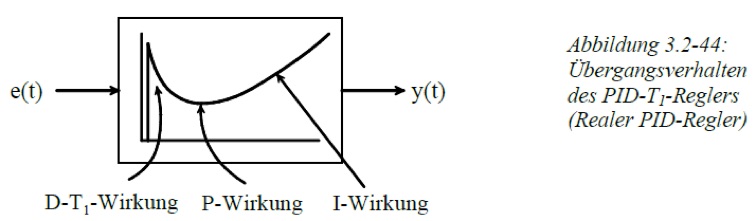
Wie leicht zu erkennen ist, liegt ein Dilemma vor, denn die geforderte Kausalitätsbedingung ist verletzt. Der ideale PID-Regler ist kein technisch realisierbares System, denn sein ideales Impulsverhalten lässt sich mit realen Bauteilen nicht realisieren. Technisch realisierbare PID-Regler besitzen immer auch Zeitverzögerungen. Der einfachste von ihnen ist der PID-T1-Regler. Ihn bezeichnet man deshalb als realen PID-Regler. Seine Übertragungsfunktion erfüllt die angegebene Voraussetzung und lautet:
Die PID-T1-Übergangsfunktion beschreibt das reale Verhalten eines PID-Reglers auf ein Sprungsignal, weshalb für ihn das folgende Symbol verwendet wird: