Freitag, 7. April 2017


4. Simulation Antriebstrang mit SimDriveline - Basis-SE
Im vierten Teil stellen wir Basis-Simulationselemente (SE) vor. Die Bauteile selber finden sich in der Simulink-Bibliothek „Library Browser“ weiter unten unter der Rubrik “Simscape/Foundation/Library/Mechanical/”. Hierunter finden sich weitere Unterrubriken, welche wir einzeln vorstellen möchten.
Rubrik „Rotational Elements“
„Inertia“

-
• Dieses SE kann mit eine Drehachse verbunden werden und macht daraus dann eine Welle mitsamt einem Massenträgheitsmoment
„Mechanical Rotational Reference“

-
• Dieses SE kann Wellen oder Eingänge mit dem Raum-Koordinatensystem verbinden
„Rotational Damper“

-
• Der rotatorische Dämpfer wirkt Drehschwingungen entgegen
-
• Angabe des Dämpfungskoeffizienten [in Drehmoment/Drehzahl]
-
• Anschlüsse:
-
• R: Eingang ist eine Welle
-
• C: Ausgang ist eine Welle
-
• Es kann eine Start-Drehzahl und ein Start-Drehmoment definiert werden
„Rotational Free End“

-
• Dieses SE kann an Wellenenden angekoppelt werden, um diesen eine Start-Drehzahl zu geben
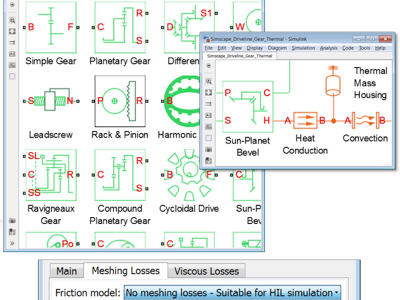
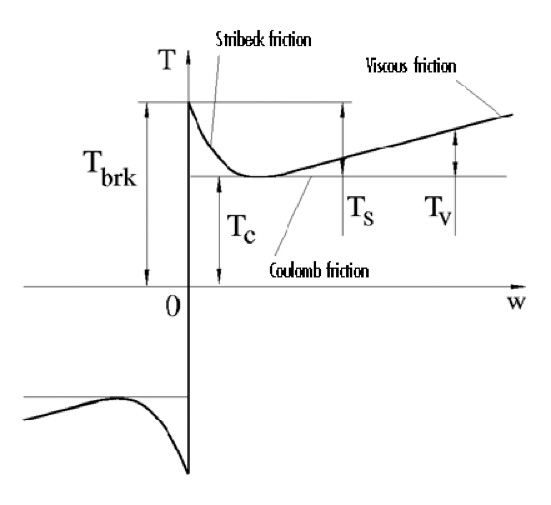
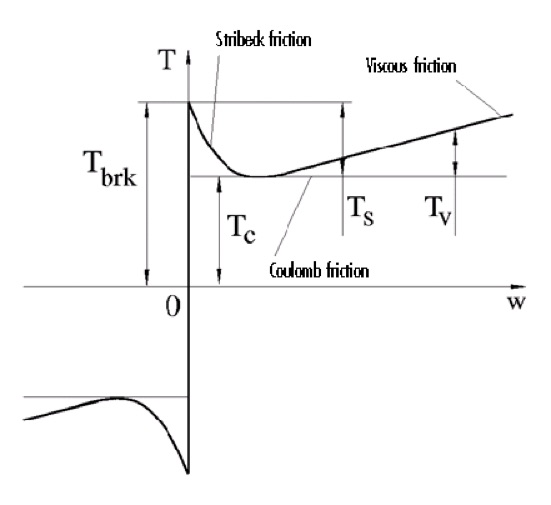
„Rotational Friction“

-
• Dieses SE kann Reibmoment abhängig von der Differenzdrehzahl nach der Stribeck-Kurve übertragen
-
• Angabe der Werte:
-
• Losbrechmoment
-
• Coulomb-Reibmoment (konstant)
-
• Viskose Reibung [in Drehmoment/Drehzahl]
-
• Auflösung [in Zeit/Drehwinkel]
-
• Minimal zulässige Drehzahl
„Rotational Hard Stop“

-
• Dieses SE kann eine Drehbewegung mit 2 Endanschlägen begrenzen. Dabei können auch Steifigkeiten beim Anschlagen an den Endanschlag berücksichtigt werden.
-
• Angabe der Werte:
-
• Oberer Drehwinkel
-
• Unterer Drehwinkel
-
• Kontaktsteifigkeit am oberen Anschlag
-
• Kontaktsteifigkeit am unteren Anschlag
-
• Kontaktdämpfung am oberen Anschlag
-
• Kontaktdämpfung am unteren Anschlag
-
• Anschlüsse:
-
• R: Eingang ist eine Welle
-
• C: Ausgang ist eine Welle
-
• Es kann eine Start-Drehzahl, ein Start-Drehmoment und ein Anfangswinkel definiert werden
„Rotational Inerter“

-
• Dieses SE kann Drehmoment proportional zur Änderung der Differenzdrezahl zwischen 2 drehenden Bauteilen erzeugen
-
• Angabe des Wertes:
-
• Massenträgheit [in kgm2]
-
• Anschlüsse:
-
• R: Eingang ist eine Welle
-
• C: Ausgang ist eine Welle
-
• Es kann eine Start-Drehzahl und ein Start-Drehmoment definiert werden
„Rotational Spring“

-
• Die rotatorische Feder ist linear wirkend und speichert Energie
-
• Angabe der Drehfederrate [in Drehmoment/Drehwinkel]
-
• Anschlüsse:
-
• R: Eingang ist eine Welle
-
• C: Ausgang ist eine Welle
-
• Es kann eine Start-Drehzahl, ein Start-Drehmoment und ein Anfangswinkel definiert werden
Rubrik „Translational Elements“
„Masse“

-
• Dieses SE kann mit einem sich linear bewegenden Körper verbunden werden und verleiht diesem damit eine Masse.
-
• Es kann eine Start-Geschwindigkeit und eine Start-Kraft definiert werden
„Mechanical Translational Reference“

-
• Dieses SE kann linear bewegliche Körper mit dem Raum-Koordinatensystem verbinden
„Translational Damper“

-
• Der translatorische Dämpfer wirkt linear wirkenden Schwingungen entgegen
-
• Angabe des Dämpfungskoeffizienten [in Kraft/Geschwindigkeit]
-
• Anschlüsse:
-
• R: Eingang ist ein Körper
-
• C: Ausgang ist ein Körper
-
• Es kann eine Start-Geschwindigkeit und eine Start-Kraft definiert werden
„Translational Free End“

-
• Dieses SE kann an Bauteilenden angekoppelt werden, um diesen eine Start-Geschwindigkeit zu geben
„Translational Friction“

-
• Dieses SE kann Reibkraft abhängig von der Relativgeschwindigkeit nach der Stribeck-Kurve übertragen
-
• Angabe der Werte:
-
• Losbrechkraft
-
• Coulomb-Kraft (konstant)
-
• Viskose Reibung [in Kraft/Geschwindigkeit]
-
• Auflösung [in Zeit/Weg]
-
• Minimal zulässige Geschwindigkeit
-
• Es kann eine Start-Geschwindigkeit und ein Start-Kraftdefiniert werden
„Translational Hard Stop“

-
• Dieses SE kann eine Translations-Bewegung mit 2 Endanschlägen begrenzen. Dabei können auch Steifigkeiten beim Anschlagen an den Endanschlag berücksichtigt werden.
-
• Angabe der Werte:
-
• Obere Wegbegrenzung
-
• Untere Wegbegrenzung
-
• Kontaktsteifigkeit am oberen Anschlag
-
• Kontaktsteifigkeit am unteren Anschlag
-
• Kontaktdämpfung am oberen Anschlag
-
• Kontaktdämpfung am unteren Anschlag
-
• Anschlüsse:
-
• R: Eingang ist ein Körper
-
• C: Ausgang ist ein Körper
-
• Es kann eine Start-Geschwindigkeit, eine Start-Kraft und ein Anfangsweg definiert werden
„Translational Inerter“

-
• Dieses SE kann Kraft proportional zur Änderung der Geschwindigkeit zwischen 2 Bauteilen erzeugen
-
• Angabe des Wertes:
-
• Massenträgheit [in kgm2]
-
• Anschlüsse:
-
• R: Eingang ist ein Körper
-
• C: Ausgang ist ein Körper
-
• Es kann eine Start-Geschwindigkeit und eine Start-Kraft definiert werden
„Translational Spring“

-
• Die Druckfeder ist linear wirkend und speichert Energie
-
• Angabe der Federrate [in Kraft/Weg]
-
• Anschlüsse:
-
• R: Eingang ist ein Körper
-
• C: Ausgang ist ein Körper
-
• Es kann eine Start-Geschwindigkeit, eine Start-Kraft und eine Startposition definiert werden
Rubrik „Mechanisms“
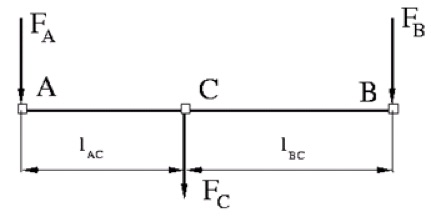
„Lever“

-
• Dieser Block stellt einen idealen Hebel dar, der wie eine Art Wippe wirkt
-
• Angabe der Werte:
-
• Hebellänge A
-
• Hebellänge B
-
• Anschlüsse:
-
• A, B: Eingang sind 2 Körperpositionen
-
• C: Ausgang ist eine Körperposition
-
• Es kann für alle 3 Anschlüsse Start-Kräfte definiert werden
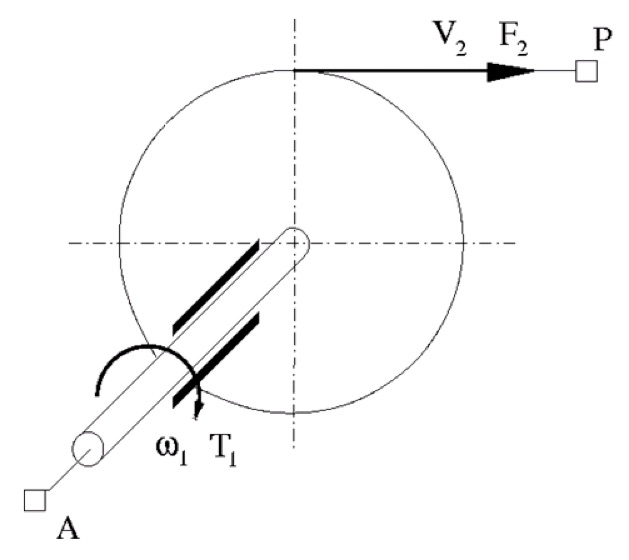
„Wheel and Axle“

-
• Dieser Block stellt einen idealen Konvertieren dar, der wie ein abrollendes Rad wirkt
-
• Angabe der Werte:
-
• Radhalbmesser
-
• Definition der Drehrichtung
-
• Anschlüsse:
-
• A: angeschlossen wird eine Drehachse
-
• C: angeschlossen wird ein translatorischer Weg
-
• Es kann eine Start-Kraft und ein Start-Drehmoment definiert werden
„Gearbox“

-
• Dieser Block stellt eine ideale einfache Getriebestufe dar
-
• Angabe des Werts:
-
• Übersetzung
-
• Anschlüsse:
-
• S: angeschlossen wird eine Drehachse
-
• O: angeschlossen wird eine Drehachse
-
• Es können 2 Start-Drehmomente definiert werden