Samstag, 27. Februar 2016



1. Die Radaufhängung und die Spurstangen einer gelenkten Achse einer Achsschenkellenkung
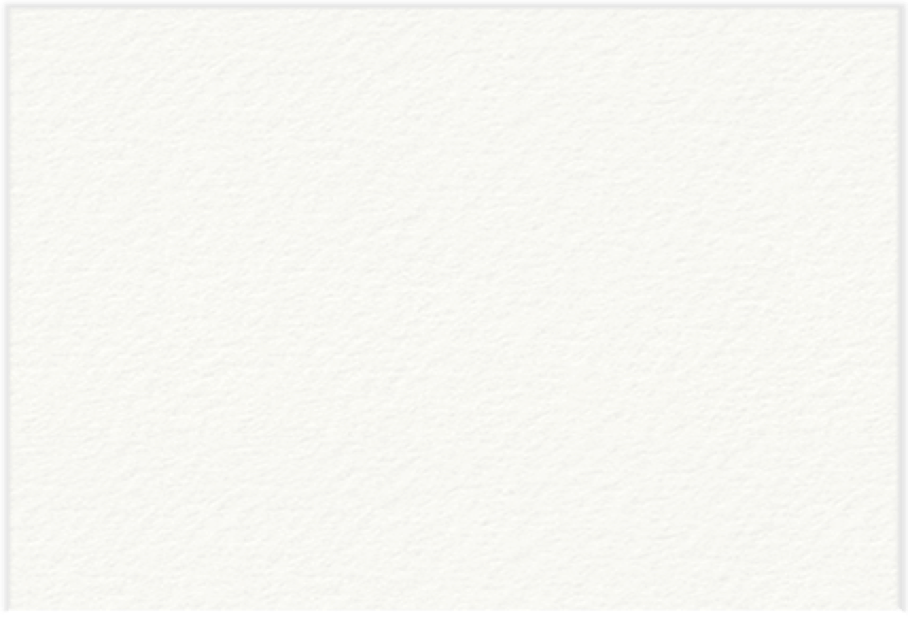
Die Radaufhängung an der gelenkten Achse (Vorderachse)
Die Anforderung an die Vorderräder sind gleich mehrere. Zum einen sollen sie vertikal gefedert sein.
-
• Die Radnabe ist das Bauteil auf dem das Radlager eingepresst ist und damit mit der sich drehenden Felge befestigt ist.
-
• Die Radnabe verfügt über zwei Drehgelenke mit vertikaler Achse um die Radachse drehen zu können und damit mit dem Rad Lenkbewegungen herbeiführen zu können. Ein längerer Ausleger dient zur Anbindung des Lenkgestänges, mit welchem der Lenkwinkel beeinflusst werden kann. Ein weiterer Gelenkpunkt dient zur Befestigung des Federbeins, um die Radnabe nach unten zu drücken und somit das Fahrzeuggewicht über die Feder auf das Rad abzustützen.

-
• Über das obere Drehgelenk verbunden ist der obere Achsschenkel, über das untere Drehgelenk ist der untere Achsschenkel verbunden. Die beiden Achsschenkel haben wiederum jeweils an jedem Schenkelende ein Drehgelenk mit der Achse in Fahrtrichtung zeigend. Das wird auch als 4-Punkt-Lenkung bezeichnet. Die Achsschenkel sind mit dem Chassis oder Fahrwerk verbunden und geben dem Rad einerseits die Möglichkeit sich nach oben und unten zu bewegen, andererseits dabei aber die Lenkachse weiterhin immer vertikal stehen zu lassen.
Quelle: AMG
Die Achsschenkellenkung und ihre Spurstangen
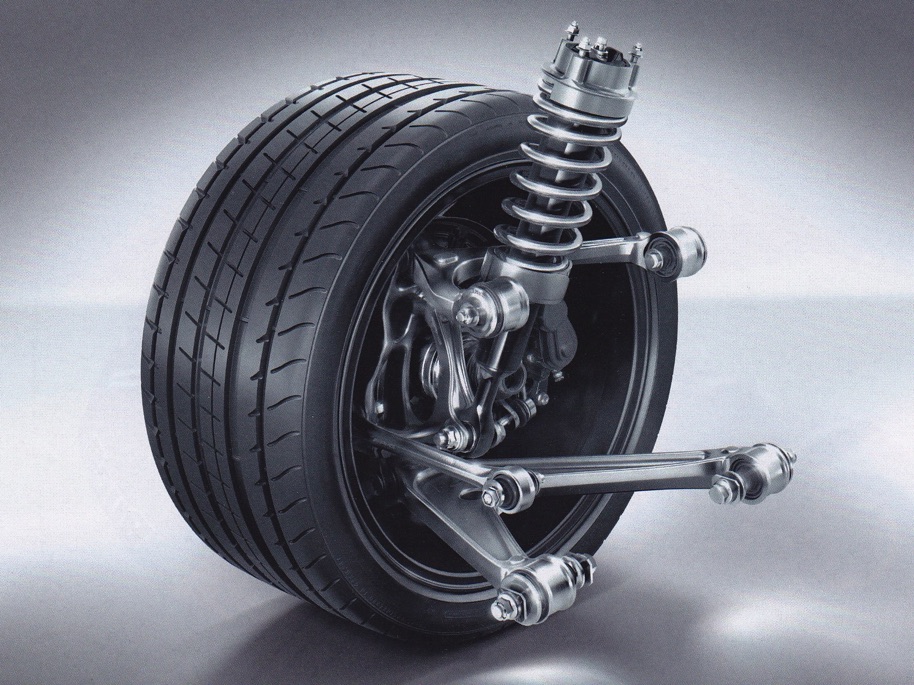
Das wichtigste Merkmal der Achsschenkellenkung nach Lankensperger/Ackermann ist das Lenktrapez. Dieses ermöglicht bei Kurvenfahrt den korrekten, für jedes Rad unterschiedlichen Lenkwinkel, unter dem das kurveninnere Rad einen größeren Lenkwinkel als das kurvenäußere Rad einschlägt.
Das Lenkltrapez besteht aus der Achse, der Spurstange und zwei Lenkhebeln an den Rädern. Die Lenkhebel sind in der Regel leicht nach innen angestellt, dadurch ergeben sich an ihnen beim Einschlagen der Räder ungleich lange wirksame Hebelarme. Dies bewirkt, dass sich die Verlängerungen aller Radachsen ungefähr im Kurvenmittelpunkt schneiden (Ackermann-Prinzip).
Die Stellung der Radschwenkachse erlaubt weitere Verbesserungen der Stabilität und Lenkbarkeit. Durch Spreizung, das heißt Neigen der Schwenkachse nach innen, nähert sie sich dem Mittelpunkt der Aufstandsfläche des Rades, der Rollradius wird kleiner, Lenkwiderstand und die Rückwirkung der Räder (z. B. durch Bremsen) auf die Lenkung verringern sich. Der Nachlauf, das heißt der Abstand zwischen Schwenkachse und Mittelpunkt der Aufstandsfläche in Fahrtrichtung wird größer, wenn sie nach hinten geneigt ist. Dadurch erreicht man eine automatische Rückstellung in den Geradeauslauf. Durch eine leichte Vorspur, die Räder stehen nicht parallel, sondern schließen sich in Fahrtrichtung, verbessert man den Geradeauslauf.
Die Achsschenkellenkung vermeidet die Nachteile der Schwenkachslenkung wie Kippneigung und starke Rückwirkung der Räder auf die Lenkung, man kann damit auch mehrachsig gelenkte Fahrzeuge realisieren.
Lenktrapez
Das Lenktrapez ermöglicht unterschiedliche Einschlagwinkel der Vorderräder, wobei das kurveninnere Rad – abhängig von Fahrzeuggeometrie und Lenkeinschlag – zwischen null und einigen Grad mehr einlenkt (Spurdifferenzwinkel). Dies vermindert das „Radieren“ der Reifen.
Das Lenktrapez ermöglicht die einfache Einstellung eines Spurdifferenzwinkels, liefert aber nur für maximal zwei Einschlagwinkel die idealen geometrischen Verhältnisse; für alle anderen Einschlagwinkel kann das Lenktrapez die passende Geometrie nur annähern.
Zur Ermittlung des Lenktrapezes gilt in erster Näherung die Faustregel, dass sich die Drehpunkte der Lenkhebel bei Geradeausstellung in der Mitte der Hinterachse treffen sollen (siehe obige Abbildung).
Spreizung
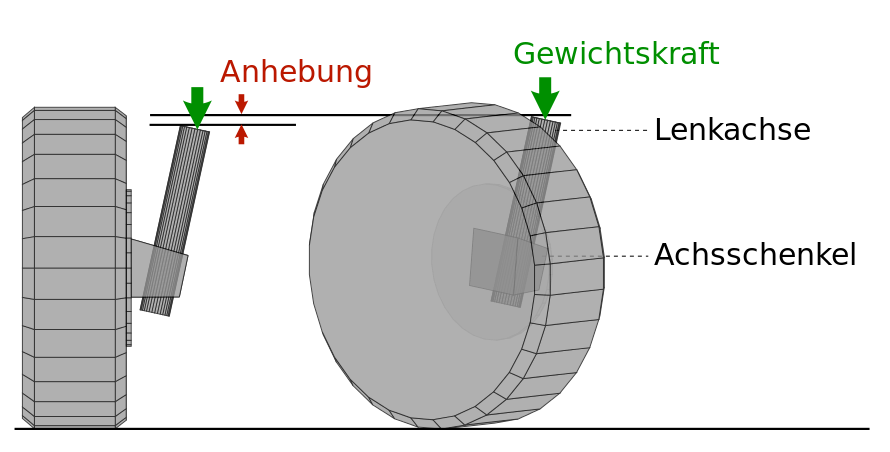
Die Lenkdrehachsen sind an jedem Rad oben leicht nach innen geneigt. Die Spreizung ist der Winkel in der Projektion auf die Querebene des Fahrzeugs gegenüber der Senkrechten zur Fahrbahn. Dies verkleinert den Lenkrollradius. Beim Einschlagen der Räder bewirkt die Spreizung, dass das Fahrzeug vorne minimal angehoben wird.
Rückstellmoment
Unter Rückstellmoment versteht man die Rückstellung der Räder zum Ausgangspunkt, also in gerader paralleler Stellung zum Fahrzeug. Das Rückstellmoment muss dann eintreten, wenn der Fahrzeugführer das Lenkrad loslässt. Diese Automation ergibt sich durch die Bauart der Lenkung mit der Spreizung der Lenkdrehachsen. Durch die Gewichtskraft des Fahrzeugs entsteht ein Moment, welches die selbstständige Rückstellung der Räder zur Geradeausfahrt bewirkt. Die Lenkung wird in die Ausgangsstellung gedrückt.
Neben diesem statischen Rückstellmoment, das auch ohne das Vorhandensein von Reifenseitenkräften auftritt, gibt es ein weiteres Rückstellmoment, das aus dem konstruktiven Nachlauf sowie dem so genannten Reifennachlauf resultiert. Dabei erzeugen die Reifenseitenkräfte, deren Verteilungsschwerpunkt im Reifenlatsch einen Abstand zum Durchstoßpunkt der Lenkachse durch die Fahrbahnebene (Nachlauf) hat, ein Drehmoment, das den Radlenkwinkel zu reduzieren versucht. Da die Reifenseitenkraft bei niedrigen Querbeschleunigungen proportional dem Reifenschräglaufwinkel ist, nimmt das Rückstellmoment bei Rückkehr der Räder in Neutralstellung (Radlenkwinkel = 0) wieder ab, vorausgesetzt, der Fahrzeugschwimmwinkel (Winkel zwischen Fahrzeuglängsachse und momentaner, horizontaler Bewegungsrichtung des Fahrzeugaufbaus) ist ebenfalls Null.
(Quelle: Wikipedia)
Lenkrollradius/Lenkrollhalbmesser
Unter einem positiven Lenkrollradius (Lenkrollhalbmesser) bezeichnet man die positive Differenz aus Spurbreite - Lenkspurweite (siehe Darstellung). D.h. der Abstand der Durchstoßpunkte der Lenkachse(n) durch die Fahrbahnebene ist kleiner als die Spurbreite. Bei modernen Vorderachskonstruktionen hat sich mittlerweile auch ein negativer Lenkrollradius etabliert, bei dem die Spurbreite kleiner ist als die Lenkspurweite. Die Gründe hierfür liegen in einer besseren Fahrzeugstabilität bei µ-split-Bremsungen durch ein längskraftinduziertes Lenkmoment und eines damit einhergehenden Giermomentenaufbaus, der dem Längskraftdifferenzbedingten Giermoment entgegenwirkt. Bei Bremsungen auf sog. µ-split-Verhältnissen (links/rechts unterschiedlich hoher Reibwert µ) tritt grundsätzlich das Problem auf, dass aufgrund der unterschiedlichen Längs-/Bremskräfte ein Giermoment (Moment um die Hochachse) entsteht, das das Auto instabil werden lassen kann und es in Richtung Hoch-µ-Seite dreht. Durch den negativen Lenkrollradius wird allein aufgrund der unterschiedlichen Längskräfte ein Lenkmoment erzeugt, das die Räder in die Gegenrichtung (in Richtung low-µ-Seite) einschlagen lässt. Somit wird ein Gegengiermoment zur Abstützung des Längskraftdifferenz-bedingten Giermomentes erzeugt und die Belastung des Fahrers hinsichtlich Gegenlenkens gesenkt. Darüber hinaus kann die Auslegung der Fahrdynamikregelsysteme für diesen Fall weiter in Richtung Bremswegverkürzung optimiert werden, da der Zielkonflikt zwischen Stabilität und Bremsweg durch diesen lenkungskonstruktiven Ansatz abgeschwächt wird.
Beim Lenkrollradius Null (Mercedes W116, W123 und W126 bei den Hecktrieblern, bei den Frontrieblern diverse Citroën, wie beispielsweise DS, GS, CX (etwa bis zur verbreiteten Einführung von Servolenkungen)) trifft die verlängerte Lenkachse die Fahrbahn genau in der Mitte der Reifenaufstandsfläche. Der Einfluss von Bremskräften auf die Lenkung ist gering.
Quelle: AMG