Mittwoch, 24. Februar 2016



4. Die Lenkkraftverstärkung
Ziel einer Lenkkraftunterstützung ist es, in bestimmten Situationen (kleine Geschwindigkeiten bzw. bei größer werdendem Lenkwinkelbedarf) zusätzliche Kraft zur Betätigung der Lenkung aufzubringen. Je schwerer ein Fahrzeug ist, also je höher die statische Achslast auf der gelenkten Achse, umso mehr Kraft benötigt man am Lenkrad, um bei einer gegebenen Lenkübersetzung den Widerstand am Reifen aufzubringen und diesen zu lenken. Men denke an die Situation Wenden auf engstem Raum.
Da die Fahrzeuge immer schwerer werden, steigt der Bedarf an einer Lenkkraftverstärkung zunehmends.
Die hydraulische Servolenkung
Seit vielen Jahren gibt es die hydraulische Servolenkung, welche das (kleine) Drehmoment am Lenkrad erfasst und damit eine große hydraulische Kraft an der Anbindung zur Spurstange aufbringt
Nachteilig hierbei ist die Wirkungsgradbetrachtung: damit die hydraulische Lenkunterstützung schlagartig bereitsteht, muss immer über eine Pumpe Druck erzeugt werden. Die Pumpe läuft immer mit und verbraucht Energie, auch wenn gar nicht gelenkt wird.
Vorteilig hierbei ist, dass die Ansprechzeit des hydraulischen Pfad extrem kurz ist (bei Bremsanlagen wird seit jeher hydraulisch gebremst) und dass große Kräfte bereitgestellt werden können, die direkt vom Motor auf mechanischem Wege abgezweigt werden. Steht der Motor (Start-Stopp-Betrieb oder Staufahren), so steht die Servolenkung noch einige Minuten bereit und unterstützt das Lenken. Ist der Druckspeicher leer, muss der Motor wieder gestartet werden.
Die elektrische Servolenkung
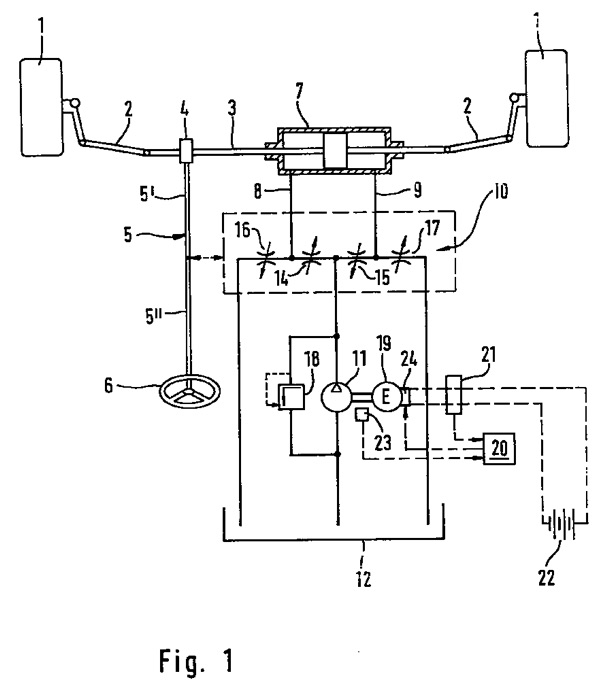
Die elektrische Servolenkung ist im Prinzip ähnlich aufgebaut. Das Drehmoment am Lenkrad wird über einen Sensor erfasst und damit ein Elektromotor bestromt, welcher über ein Überlagerungsgetriebe zusätzlich Kraft auf die Spurstange aufbringt. Auch hier ist das Ansprechverhalten sehr kurz.
Nachteilig ist hierbei, dass die Lenkkraftverstärkung direkt vom Bordnetz abhängig ist und dieses beträchtlich belasten kann. Steht der Verbrennungsmotor, dann kommt alleine die Batterie für die Lenkkraftunterstützung auf, wofür sie häufig nicht dimensioniert ist. Damit kommt es vor, dass beim Stoppen des Motors auch sofort die Lenkkraftunterstützung wegfällt. Im Stau-Betrieb oder Start-Stop-Fall ist dies nachteilig.
Vorteilig ist die Wirkungsgradbetrachtung: bedarfsgerecht wird Energie nur dann vom elektrischen Bordnetz entnommen, wenn Lenkkraftunterstützung angefordert wird.
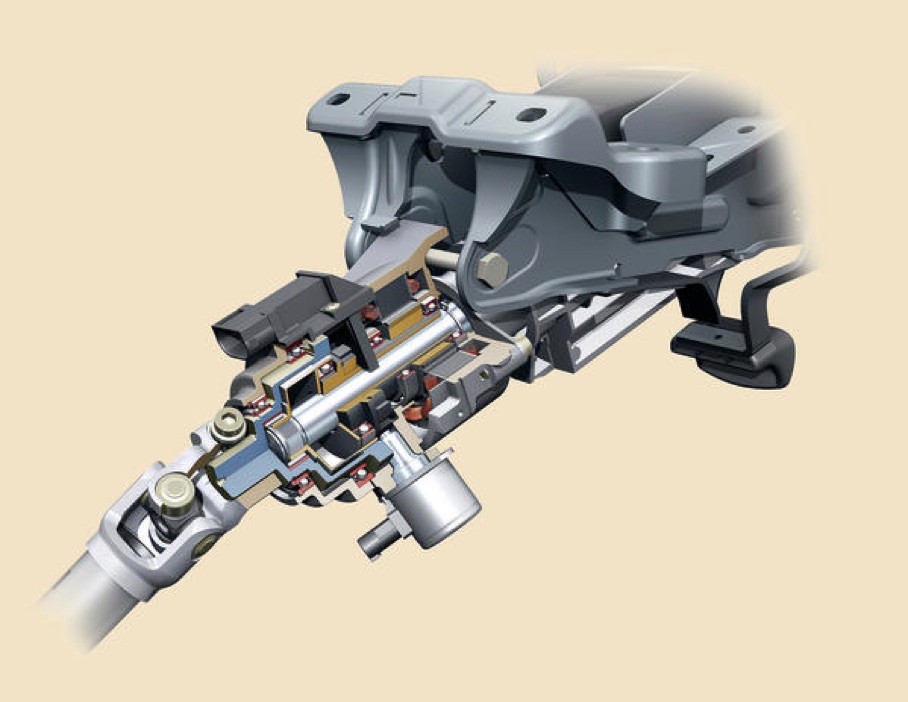
Von der Funktion her wird in der Lenkspindel ein Drehmomentfühler eingebaut, welcher bei zunehmendem Drehmoment einen Differenzdrehwinkel an seinen beidne Ende aufweist. Dieser wird gemessen und damit auf das Drehmoment am Lenkrad geschlossen. Auch das Vorzeichen des Drehmoments kann ermittelt werden. Diese Größen werden von einem Steuergerät erfasst.
Jetzt wird in diesem Falle vor dem Eingang zum Lenkgetriebe ein E-Motor angeordnet, dessen Stromstärke und Stromrichtung vom Steuergerät vorgegeben werden. Wird vom Motor zusätzliches Drehmoment eingeleitet sinkt das Drehmoment am Lenkrad bzw. möchte der Fahrer noch weiter lenken, wird dieser weiterhin stärker am Lenkrad drehen und weiteren Untersützungsbedarf anzeigen. Diese Steuerungsschleife erfolgt so lange wie sich die Räder in die richige Stellung gedreht haben. Sobald der Fahrer kein Lenkmoment mehr aufbringt und damit signalisiert, dass er keine weitere Untersützung mehr benötigt, wird auch der Strom zum Motor unterbrochen.
Lenkkraftunterstützung und Lenkwinkelunterstützung
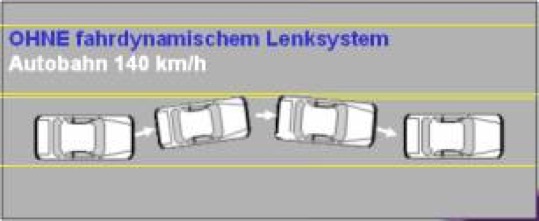
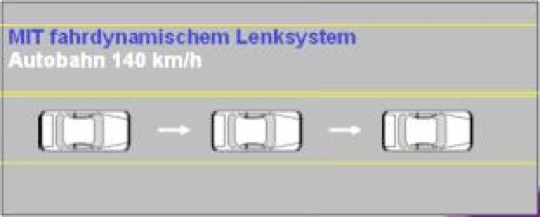
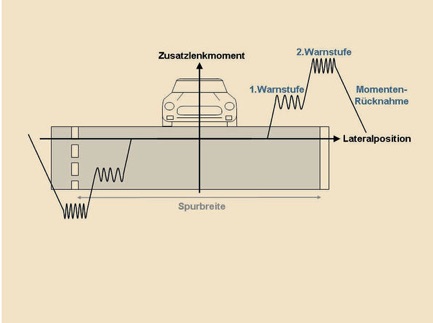
Anders als die reine kraftmäßige Unterstützung gibt es auch eine Hilfe beim teilautomatischen Lenken bzw. der Lenkunterstützung. Eine Spurhaltefunktion im Fahrzeug benötigt direkten Zugriff auf die Lenkung der Räder. Soll diese so agieren dass der Fahrer nicht davon mitbekommt (Lenkrad soll sich dabei nicht drehen), dann spricht man von einer Überlagerungslenkung.
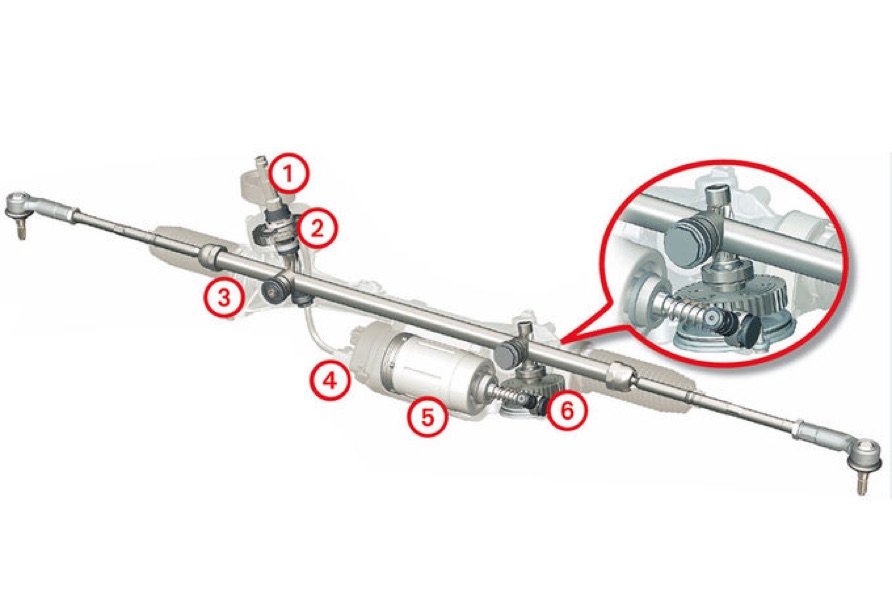
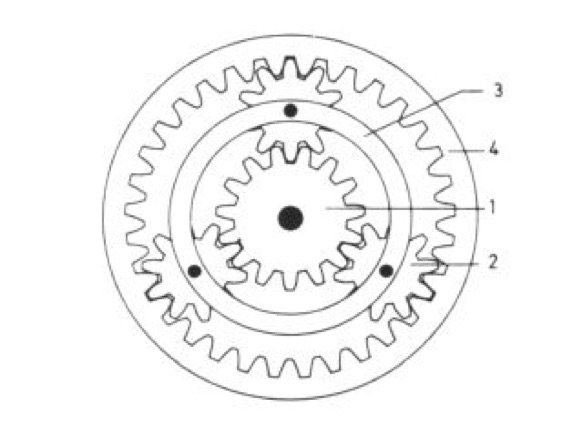
Im Prinzip kommt immer ein Überlagerungsgetriebe zum Einsatz, welches unabhängig vom Fahrer zusätzlichen Lenkwinkel erzeugen kann. Dieses ist ein Planetengetriebe, dessen Eingänge einmal direkt das Lenkrad und zum anderen ein kleiner winkelgeregelter Elektromotor darstellt.
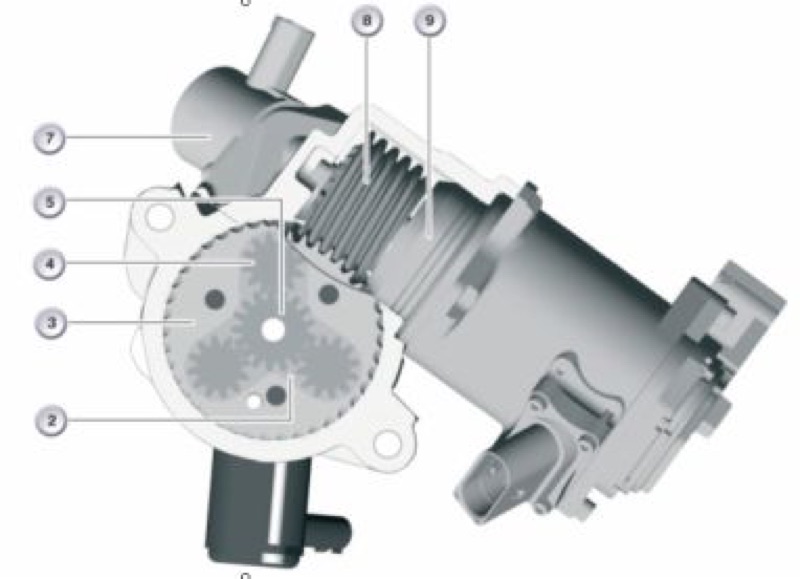
Das Überlagungsgetriebe besteht aus einem Schneckenrad (3),zwei Planetenradträgern (2) und drei Planetenräder (4). Die Planeten stellen eine mechanishce Verbindung zwischen dem oberen und dem unteren Sonnenrad dar.
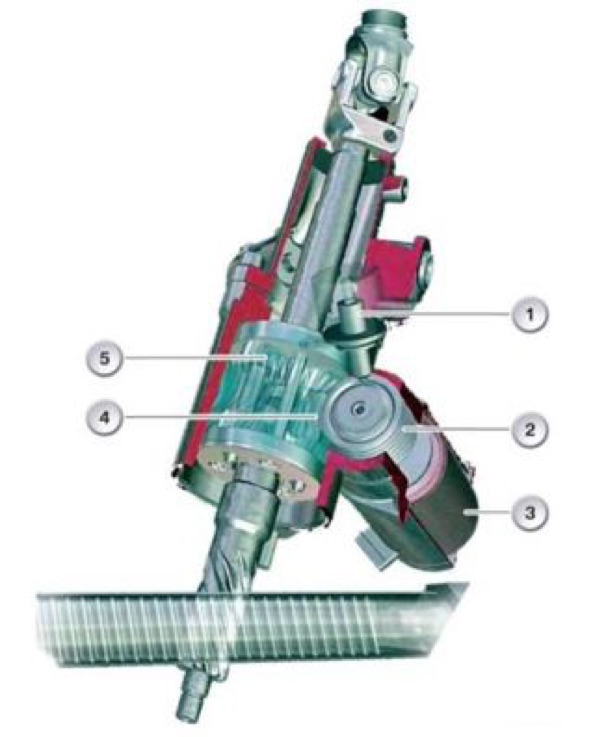
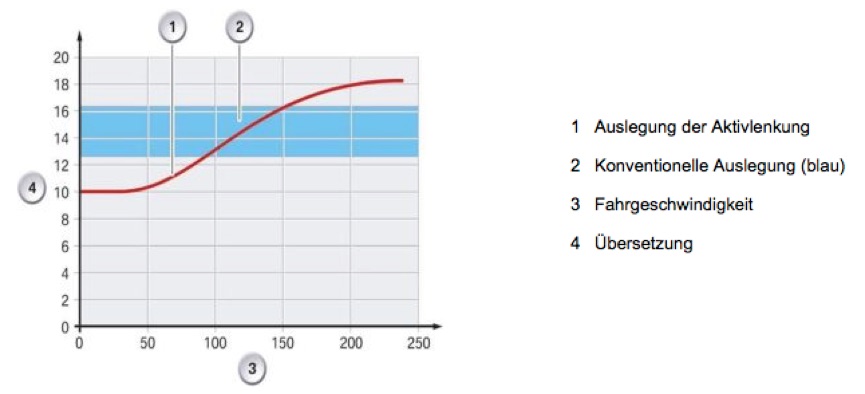
In Abhängigkeit von der Fahrzeuggeschwindigkeit greift ein Elektromotor über einen Schneckentrieb in das Planetengetriebe ein. So erzeugt das Lenksystem in bestimmten Fahrsituationen einen zusätzlichen oder umgekehrt einen reduzierten Lenkwinkel an den Vorderrädern der durch Änderung des Übersetzungsverhältnisses an der Lenkspindel (= d) erreicht wird. In kritischen Situationen kann das Lenksystem den vom Fahrer eingeschlagenen Lenkeinschlag der Räder gezielt verändern und das Fahrzeug damit schneller als der Fahrer stabilisieren.
(1) Sperre
(2) Schneckentrieb
(3) Elektromotor
(4) Schneckenrad
(5) Planetengetriebe
erweiterte Darstellung des Getriebes
Die Drehrichtung, die Drehzahl und die Dauer der Motorbewegung werden von einem angebauten Motorwinkelsensor überwacht, um den Lenkwinkel zu berechnen. Bei einer vom Elektromotor erzeugten Bewegung des Schneckenrades umkreisen die Stufenplaneten die beiden Sonnenräder. Aufgrund der Zähnezahldifferenz der Stufenplaneten entsteht eine relative Drehbewegung der Sonnenräder (Lenkspindelbewegung = Lenkbewegung) zueinander. Wäre die Zähnezahl der Sonnenräder gleich würden die Planetenräder ohne Kraftübertragung um beide Sonnenräder umlaufen. Die Lenkrad- und Schneckenbewegung (erzeugt durch den Elektromotor) wird am unteren Sonnerad zusammengeführt (Drehzahldifferenz zwischen oberen und unteren Planetensatz) und über das Antriebsritzel auf die Zahnstange übertragen.
Der Lenkwinkel fällt bei einer gleichsinnigen Bewegung von Schneckenrad und oberem Sonnenrad kleiner (negativ) aus. Bei einer gegensinnigen Bewegung fällt der wirksame Lenkwinkel größer (positiv) aus.
Als zusätzliche Bauteile zur herkömmlichen Servotronic werden neben der Stelleinheit ein Summenlenkwinkelsensor, das Aktivlenkungssteuergerät, das Sicherheits- und Gatewaymodul (SGM) und eine veränderte Hydraulikpumpe benötigt.
Lenkkraftunterstützung beim Einparken
Da eine elektrische Lenkung bedarfsgerecht angesteuert werden kann, kann in ihre Regelkreise auch die gefahrene Temperatur eingehen. Wenn das Steuergerät für die Lenkung diese Größe ebenfalls berücksichtigt, kann bei niedrigen Fahrgeschwindigkeiten eine starke Lenkuntersützung eingebracht werden, wohingegen bei schneller Autobahnfahrt die Unterstützungshöhe (Stromstärke im E-Motor) reduziert ist.
Lenkkraftuntersützung an der Spurstange bzw. hinter dem Lenkgetriebe
Andere Systeme stellen die zusätzliche Lenkuntersützung nicht auf Spindelseite bereit, sondern direkt an der Spurstange. Dadurch wird erst etwas möglich, das bisher überhaupt nicht möglich war: die Überlagerungslenkung.
Bei diesem System kann das Fahrzeug in gewissen Grenzen unabhängig vom Fahrer selber lenken, ohne dass sich das Lenkrad dreht und der Faghrer damit wahrnimmt. Spurhaltesysteme können somit sehr schnell auf Fahrereignisse wie Seitenwind oder ein Abkommen des Fahrzeugs über die FAhrspurmarkierung erkennen und selber additiv lenken.
Beim vollautomatisiertem Fahren kommt dieser Funktion eine noch bedeutendere Rolle zu.