Montag, 23. Februar 2015


Der Asynchronmotor (Wechselstrom, 3-phasig)
Dieser Motortyp benötigt in der Anwendung als Motor ein 3-phasiges Wechselfeld mit Sinus-Verläufen. Dieses Feld steht im allgemeinen Stromnetz bereits zur Verfügung und wird dort für den 3-phasigen Anschluss von Herden genutzt. Es hat 230V mit 3 Phasen, d.h. diese Sinusspannungen sind 120° zueinander phasenverschoben.
Mit einem solchen Feld ließe sich ein Asynchronmotor gut betreiben, weshalb er als Stationärmotor vielerorts im Einsatz ist und auch vom Drehmoment her prima für kleine und große Anwendungen hoch- bzw. runterskaliert werden kann.
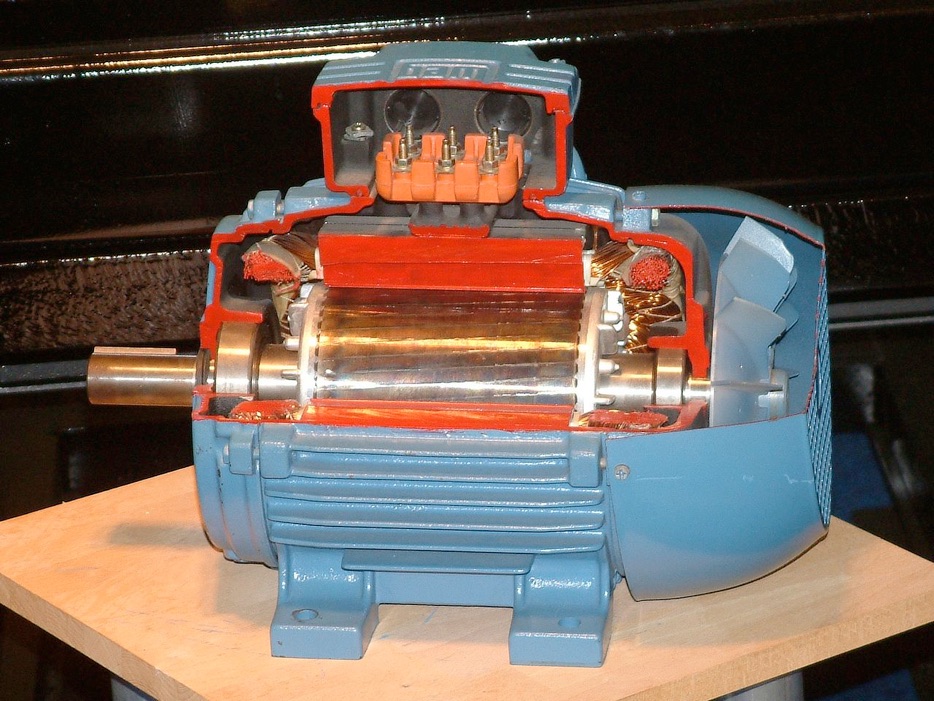
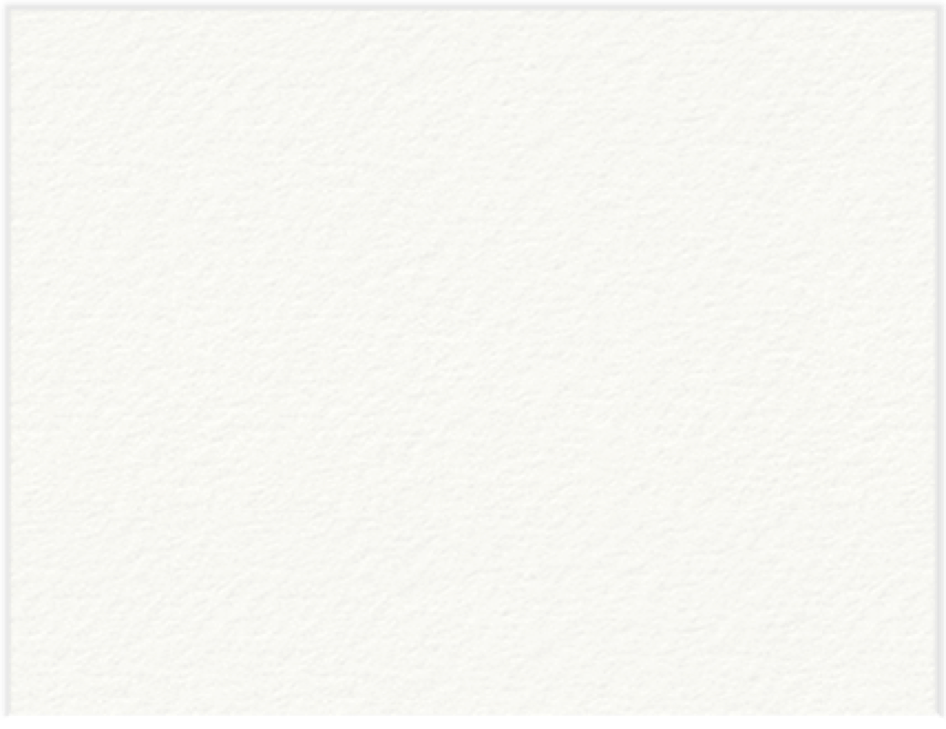
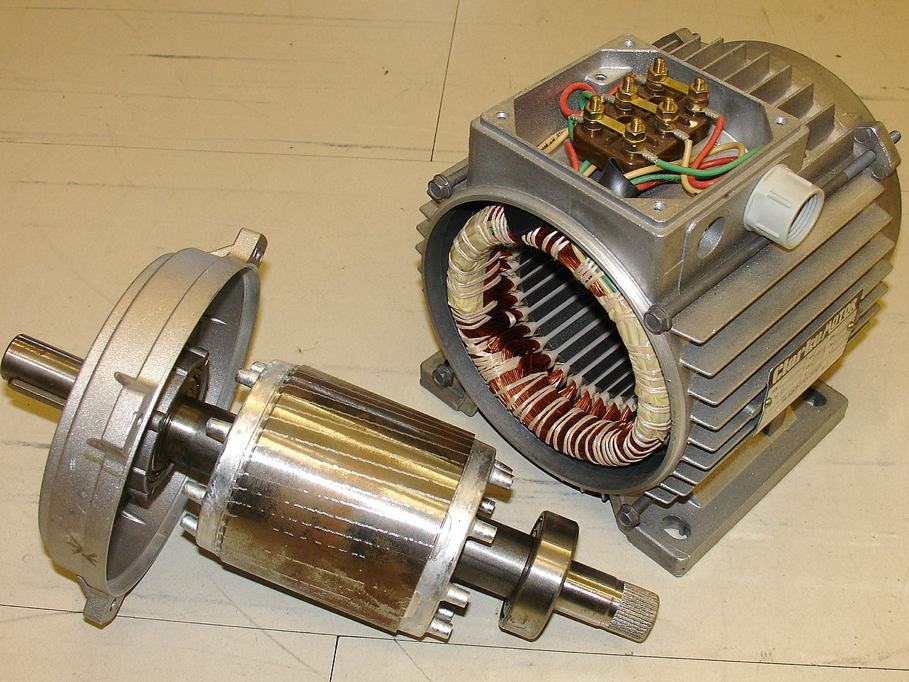
Der Asynchronmotor hat seine Wicklungen bzw. Elektromagnete im raumfesten Stator. Da er 3-phasig betrieben wird, muss er also mindestens 6-polig aufgebaut sein, also jede Phase hat mindestens ein Polpaar. In der Regel werden deutlich mehr Polpaare eingesetzt, aber eben immer ein Vielfaches von 3. Je größer der Durchmesser des Motors ist, umso mehr Polpaare lassen sich im Bauraum unterbringen. Dadurch erhöht sich das Antriebsmoment.
Der Läufer dagegen besitzt keine Stromzuführung (Kohlen oder Schleifer oder ähnliches). Das Magnetfeld wird im Läufer durch Induktion selber erzeugt, indem er aus einem „Stromleitergerüst“ derart aufgebaut ist, dass ein äußeres Magnetfeld (vom Stator) sich permanent ändert (sinusförmig) und damit die Elektronen im Läufer eine Bewegung erfahren. Es baut sich ein Strom im Läufer auf, welcher dadurch ein magnetisches Gegenfeld erzeugt.
Dieses Gegenfeld reagiert dann mit dem permanent umlaufenden Statorfeld und der Rotor dreht sich. Im Gegensatz zum z.B. Gleichstrommotor wird das Magnetfeld im Läufer nicht direkt aufgebaut und ist direkt vorhanden, sondern es wird indirekt aufgebaut und besitzt eine zeitliche Phasenverschiebung zum umlaufenden Statorfeld.
Damit wird schnell klar, warum ein Asynchronmotor asynchron ist. Ein Sychronmotor hat bereits 2 Magnetfelder, welche sich immer synchron zueinander ausrichten und damit gleichphasig umdrehen. Ein Asynchronmotor hat ein Erregerfeld im Stator und ein von ihm erzeugtes Feld im Rotor/Läufer, welches erst durch Induktion erzeugt wird. Damit kann er nie synchron mit dem Drehfeld des Stators umdrehen, sondern läuft nach.
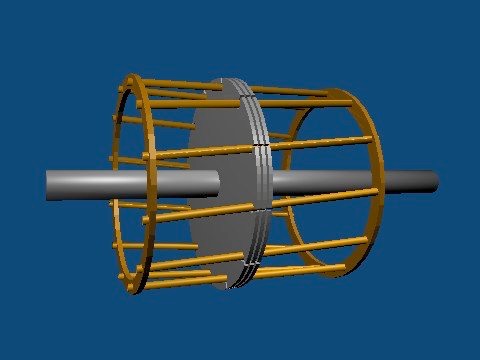
Ein Läufer kann ein Käfigläufer oder ein Kurzschlussläufer sein. Das bedeutet, dass die induzierten Ströme innerhalb des Läufers bleiben und dort auch wieder kurzgeschlossen verschwinden. Es ist keinerlei Stromdurchführung nach draußen notwendig.
Die Drehmomentkennlinie
Durch die asynchrone Eigenschaft läuft das Statorfeld mit einer definierten Frequenz um (z.B. 50 Hz). Da das Läuferfeld zeitversetzt aufgebaut wird, dreht es zeitversetzt zum Läuferfeld und auch mit geringerer Drehzahl. Denn das wirkende Drehmoment ist umso größer, umso höher die Drehzahldifferenz ist. Wenn also der Läufer keinerlei Last hätte und ohne Reibung funktionieren würde, so könnte er gleich schnell drehen. Dann würde aber auch kein Drehmoment zum Mitdrehen mehr erzeugt.
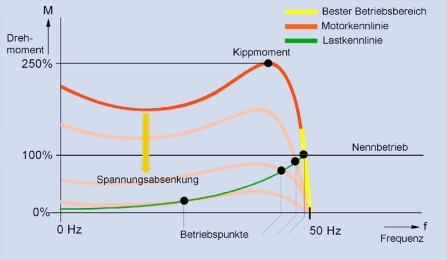
Sobald also etwas Last oder Reibung auftritt, wird der Läufer abgebremst und das Drehmoment wird erhöht. Dadurch wird er wieder beschleunigt. Es pendelt sich somit ein stabiler Zustand ein, bei einem bestimmten Schlupf. Im Diagramm oben sieht man, dass das Drehmoment proportional zum Schlupf ist.
Übersteigt die Last ein bestimmtes Drehmoment, so wird das Kippmoment überschritten (siehe Bild unten). Dann fällt das Drehmoment massiv ab und der Motor würde einen sehr großen Schlupf bekommen und dann auf einem deutlich geringerem Drehmoment verharren. Damit würde der Motor aus dem Tritt kommen und stehen bleiben. Erst wenn die Last wieder ausreichend gering ist, damit das Drehmoment den Läufer wieder auf Nenndrehzahl bringen kann, kann er Motor wieder größere Drehmomente aufbringen.
Daher hat der Asynchronmotor beim Anlaufen immer die Erfordernis, dass er möglichst ohne Last oder mit geringer Last angefahren wird. Sobald er dann die Kippdrehzahl erreicht hat und im Bereich des hohen Drehmoments im Kennfeld betrieben wird, können Verbraucher zugeschalten werden.
Asynchrongeneratoren haben ihren Namen durch die Eigenschaft, daß der Rotor nie mit der Frequenz des Stators umläuft, dieser Effekt wird Schlupf genannt. Der Schlupf berechnet sich aus der synchronen Drehzahl des Stators (Netzdrehzahl) und der Drehzahl des Rotors:
s = (ns - n) / ns
Der Schlupf kann zwischen 1 (bei Stillstand) und 0 (bei idealem Leerlauf) betragen. Im normalen Betrieb ist s < 0,10.
Die synchrone Drehzahl ergibt sich aus der Netzfrequenz f und der Polpaarzahl p :
ns = f / p
Bei einer Netzfrequenz von 50 Hz und einer Polpaarzahl von 1 (zwei Pole, ein Paar) ergibt sich eine synchrone Drehzahl von 3000 Umdrehungen pro Minute. Diese Drehzahlen erfordern den Einsatz von Getrieben.
Der Rotor einer Asynchronmaschine ist meist als Kurzschluß- oder Käfigläufer ausgeführt, er benötigt keine Stromzuführung, da im Rotor eine Spannung durch das Drehfeld des Stators induziert wird.
Voraussetzung für die Induktion ist aber ein Blindstrom im Stator, diese Blindleistung wird im Netzbetrieb zum Teil aus dem Netz bezogen, im Inselbetrieb ist für eine Blindleistungskompensation zu sorgen.
Um Aussagen über das Drehmomentverhalten einer Asynchronmaschine zu machen, müssen die Daten des Kippunktes einer Maschine, Kippmoment Mk und Kippschlupf sk gegeben sein. Mit der Kloßschen Formel :
M/Mk=2 / ( s / sk + sk / s )
läßt sich das Drehmoment für jeden Schlupf bestimmen.
Die Drehmoment-Strom-Kennlinie
Wie alle Elektromotoren ist auch beim Asynchronmotor das Drehmoment linear abhängig vom Strom (dunkelblau im Diagramm). Beim Anfahren mit Drehzahl Null (orange im Diagramm) ist die Stromaufnahme am höchsten, und damit auch das Anfahrmoment. Auch das ist ein typisches Motorverhalten von elektrischen Maschinen.
Der Generatorbetrieb
Asynchronmotoren werden häufig in Windkrafträdern als Generator eingesetzt. Asynchrongeneratoren werden meist im Netzparallelbetrieb verwendet, dieses "Dänische" Konzept ist weit verbreitet.
Wenn genügend Wind vorhanden ist, wird die Anlage an das Netz geschaltet, wodurch die Asynchronmaschine den Rotor zunächst als Motor beschleunigt. Wird die synchrone Drehzahl dann erreicht, geht die Maschine in den Generatorbetrieb über und die Anlage speist Energie in das Netz ein.